|
|
【ブラウザはGoogle Chrome】
●最新版ダウンロードはこちら 【お知らせ】Windows7でChromeがフリーズを起こす場合は、コントロールパネル⇒管理ツール⇒サービス でWindows Media Player Network Sharing Serviceを停止かつ無効にします。Micorosoftのバグです。 |
||
【本サイトのご利用指針】
当サイトはSPAM対策等のためJavaScriptを使っています。
JavaScriptの実行を可能な状態にしてご利用下さい。
Please enable the execution of JavaScript!

当サイトはSPAM対策等のためJavaScriptを使っています。
JavaScriptの実行を可能な状態にしてご利用下さい。
Please enable the execution of JavaScript!

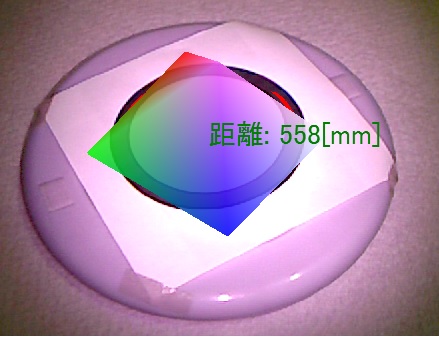
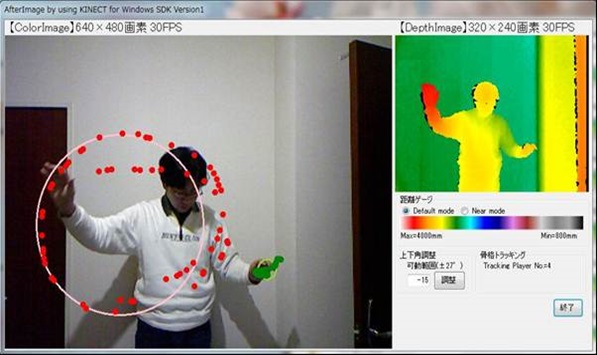
【HTML5+JavaScript+AR】【円形マーカーで拡張現実センシング!】~インターフェース2013年10月号【研究】『位置センシング』~ |
||
 『Kinectが変えるセンシングの世界』 |
【リンクフリー】 私設研究所ネオテックラボ Neo-Tech-Lab.co.uk 【記載者】 【私設研究所Neo-Tech-Lab】 上田 智章 |
作成日 2013/03/30 |
ここにチェックボックス型外部コンテンツ・メニューが入ります。 | ||






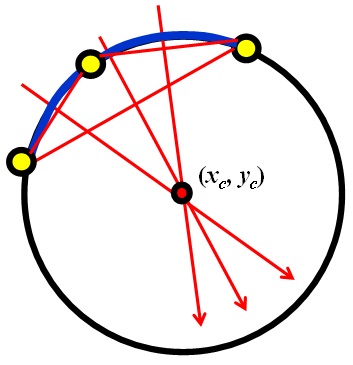
 と
と を結ぶ線分(弦)の中点である
を結ぶ線分(弦)の中点である を通り、前記線分に直交する直線は円の中心
を通り、前記線分に直交する直線は円の中心 を通る性質があります。
を通る性質があります。 (1)
(1) (2)
(2) (3)
(3) (4)
(4) (5)
(5) (6)
(6) (7)
(7) (8)
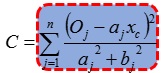
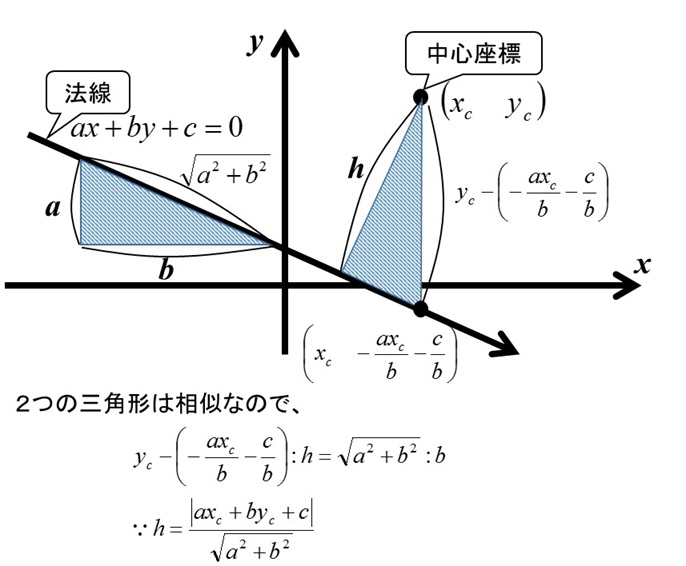
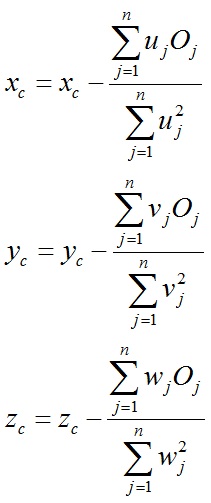
(8) は次式(9)で表記されます。
は次式(9)で表記されます。 (9)
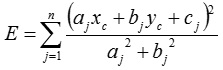
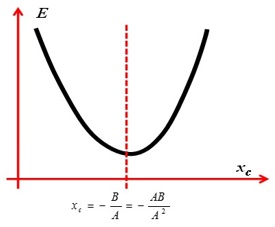
(9) を示しますが、最小2乗法ではすべてのサンプル法線に対して良い推定値を取得する推定誤差評価関数Eとして次式が使われます。
を示しますが、最小2乗法ではすべてのサンプル法線に対して良い推定値を取得する推定誤差評価関数Eとして次式が使われます。 (10)
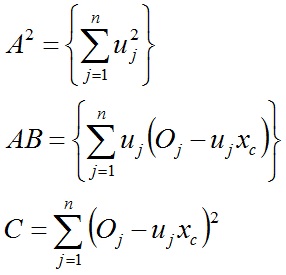
(10) (11)
(11) と
と の2つがありますが、
の2つがありますが、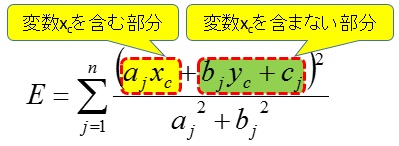 (12)
(12) (13)
(13) (14)
(14) (15)
(15) (16)
(16) (17)
(17) (18)
(18) (19)
(19) (20)
(20) (21)
(21)
 、
、 の中点を
の中点を 、2点を結ぶベクトル
、2点を結ぶベクトル の正規化ベクトルを
の正規化ベクトルを とします。式(1), (2), (3), (4), (5)が得られます。
とします。式(1), (2), (3), (4), (5)が得られます。 (1)
(1) (2)
(2) (3)
(3) (4)
(4) (5)
(5) (6)
(6) を通過するとは限らず、誤差を伴うことが考えられます。
を通過するとは限らず、誤差を伴うことが考えられます。 で次式(7)のように求めることができます。
で次式(7)のように求めることができます。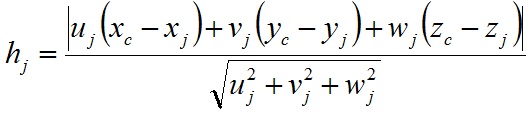 (7)
(7) (8)
(8) (9)
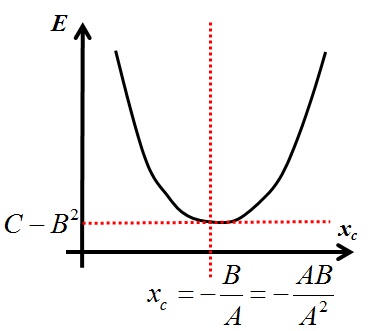
(9) と定義します。
と定義します。 に関してのみ誤差評価関数Eとの関係を考えます。
に関してのみ誤差評価関数Eとの関係を考えます。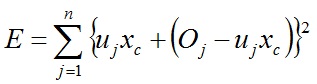 (10)
(10) (11)
(11) (12)
(12) (13)
(13) (14)(15)(16)
(14)(15)(16)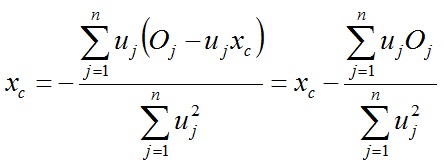 (17)
(17) (18),(19),(20)
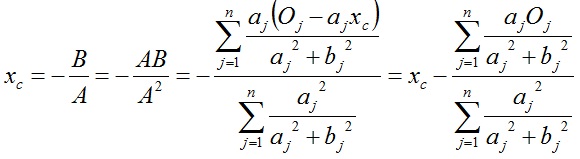
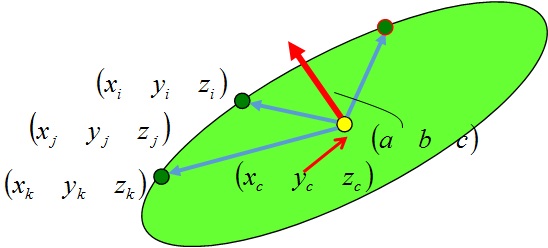
(18),(19),(20) は推定した円の中心座標と円周上の各点との平均距離で、法線ベクトル
は推定した円の中心座標と円周上の各点との平均距離で、法線ベクトル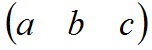 は円の中心から選択2点への2つのベクトルの外積ベクトルの平均値を正規化することにより得られる。
は円の中心から選択2点への2つのベクトルの外積ベクトルの平均値を正規化することにより得られる。
 ②
② ③
③
 ⑤
⑤ ⑥
⑥
 ⑧
⑧ ⑨
⑨