|
【3Dスキャナへの道】
一応、記事は書いてみたものの、いろいろと1回で紹介するには雑誌の性格上の問題(特に数式の紹介に関して)、ページ数の制約などがあり、現段階では以下の情報しか公開できません。悪しからず。
|
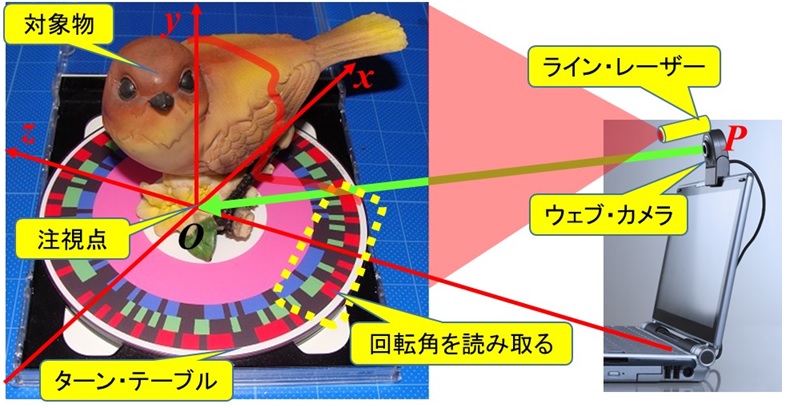
【図1】全体構成
|
|
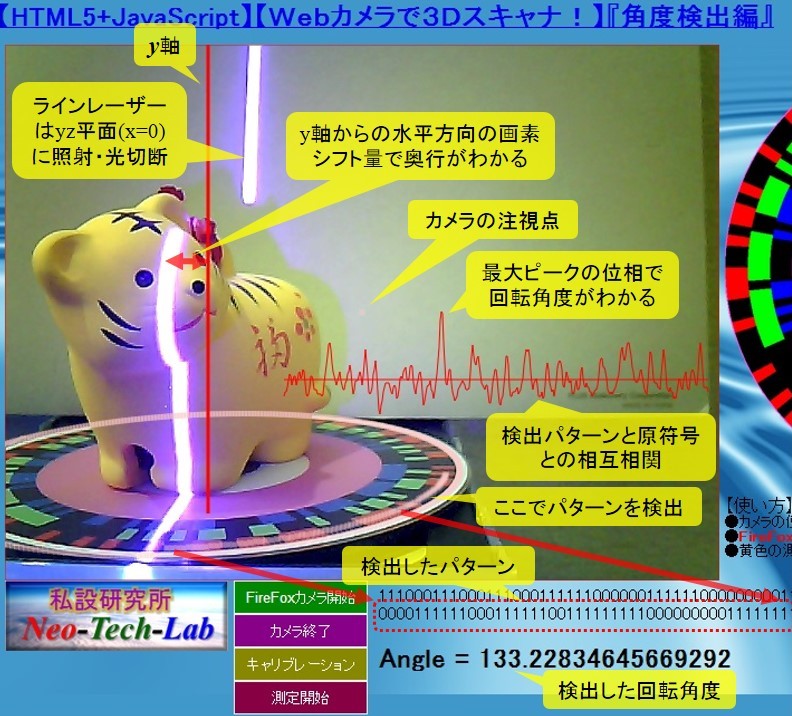
【3Dスキャナの全体構成】
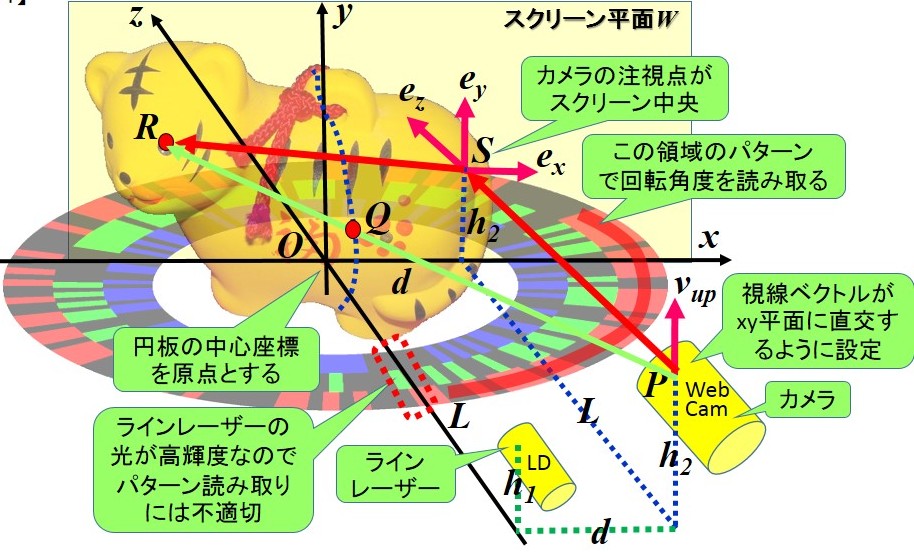
諸事情によりまだ紹介するまでに時間がかかりますので、ヒントを残しておきます。ターンテーブルタイプの3Dスキャナを製作する場合には、図1に示すようにラインレーザーのビームがターンテーブルの円板の中心を通るようにセットします。円板の中心座標を原点Oとします。即ちy軸は原点Oを通過し、円板に垂直な法線ベクトルと一致します。つまり、ライン・ビームのy軸からの水平シフト量がy軸からの距離に対応することになります。カメラはxy平面に垂直となるようにセットします。カメラの視線ベクトルとスクリーン平面xyの交点が注視点座標となります。
角度判定パターンの読み取りはラインレーザーのビームを避けて配置します。ビームの照射される場所はカメラがハレーションを起こしてしまい、正しくパターンを判定することができないからです。読取座標は記事で書いたように透視変換を使って求めます。
|

【図2】Webカメラとラインレーザーの位置関係
|
|
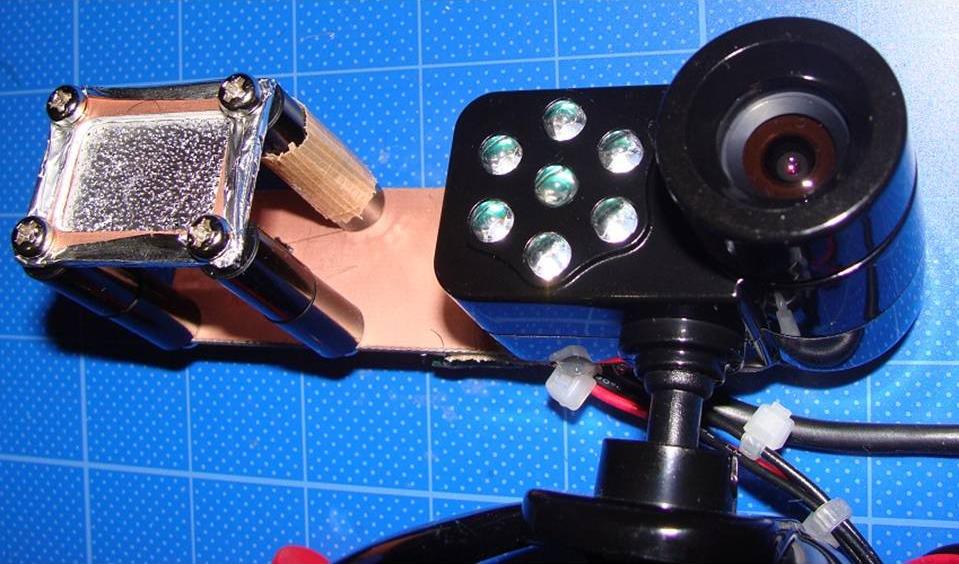
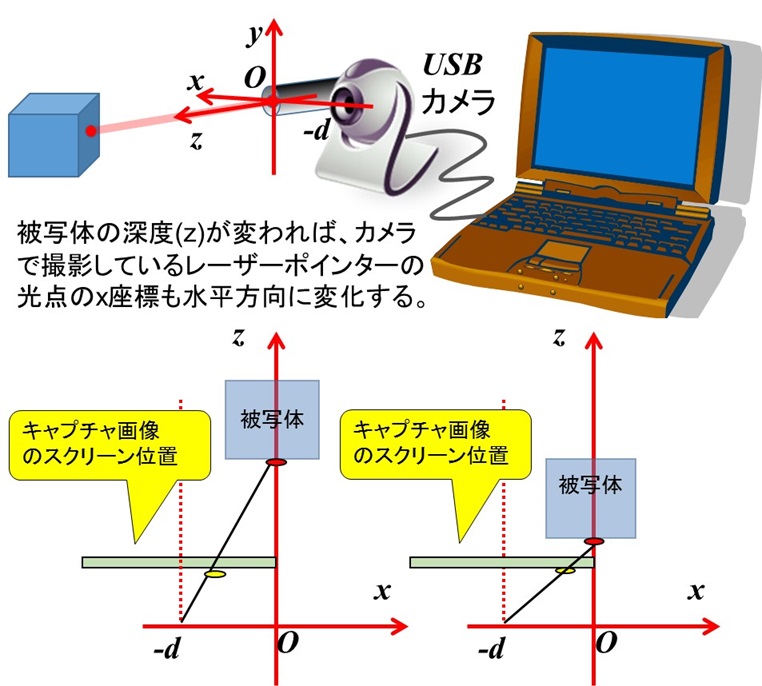
【Webカメラとラインレーザーの位置関係】
図2に示すようにWebカメラとラインレーザーの取り付け位置は水平方向にずれた位置に設定します。設計情報が正確であればWebカメラのレンズ中心とレーザービームの照射点の高さは一致させる必要性はありませんが、設計情報としてターンテーブル円板面からの高さを精確に把握する必要があります。
|
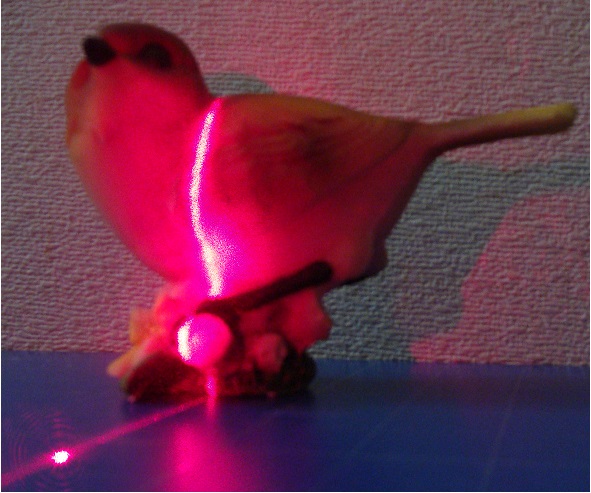
【図3】ラインレーザーの自作について
|
|
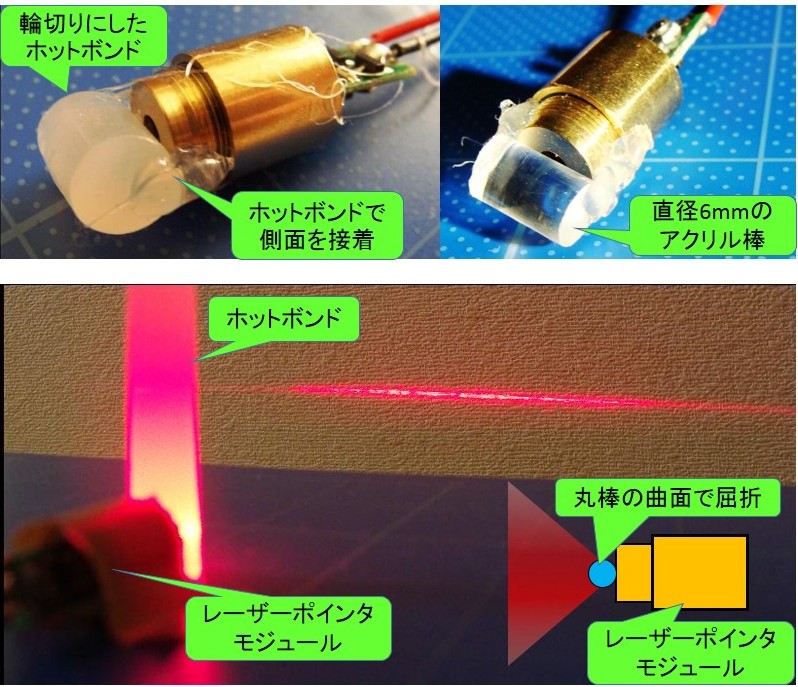
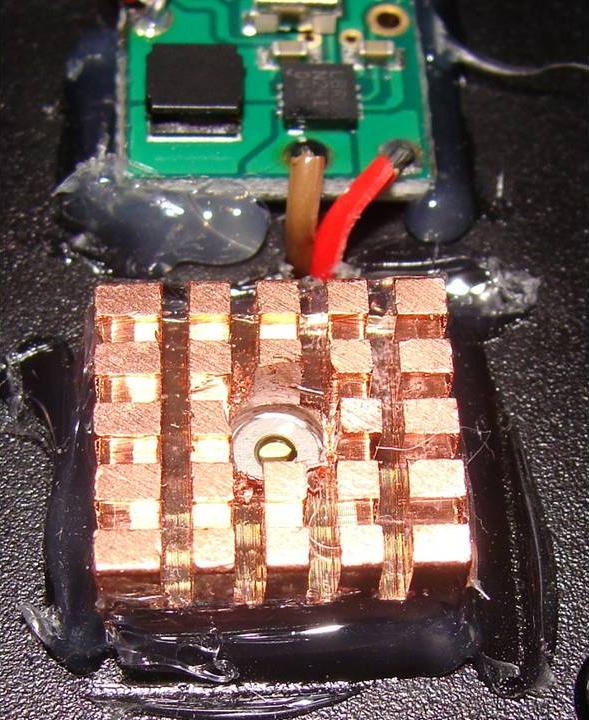
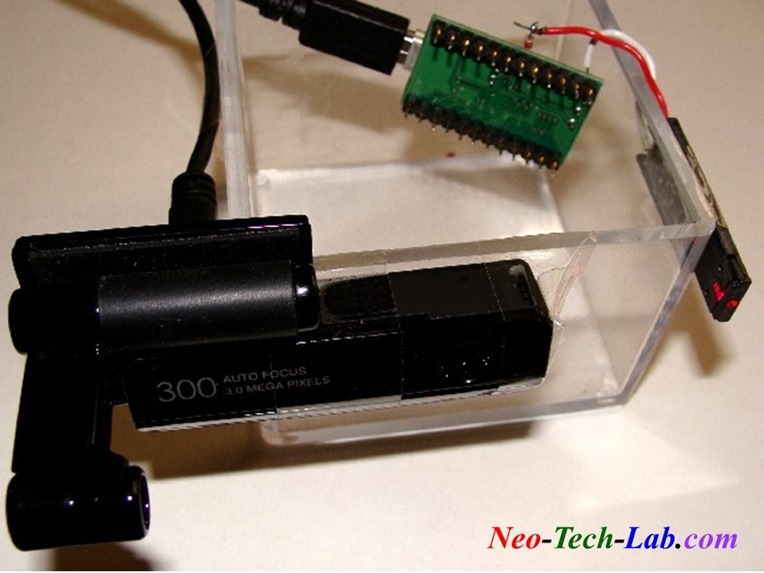
【ラインレーザーは自作できる】
価格400円~650円台でレーザーポインタ・モジュールが秋月電子通商(秋葉原)や共立電子(大阪日本橋)等で市販されています。これらを少し改造することで比較的簡単にラインレーザーを自作することができます。図3に示すように直径6mmのアクリル棒またはホットボンドの棒を輪切りにして接着するだけで作ることができます。アクリル棒の場合、近距離だとレーザーの輝度が高く、ハレーションを起しやすいかもしれません。ホットボンドは不透明なので内部で拡散してからラインを形成するため近距離の距離測定に適しているかもしれません。いずれにしてもより細い線材を調達できた方がきれいなラインビームが生成できそうです。
でも、自作は面倒だという方は、2200円または1260円でラインレーザーモジュールが販売されていますのでそちらをご利用ください。使い方は単三電池2個で3Vの電圧をかけるだけです。LED Ecology Web Shopのラインレーザーは価格が少し高いですが、ライン幅を調整可能という特徴があり、これは便利な特徴です。
●LED Ecology Web Shop
【ラインレーザー通販サイト①】青紫2200円
●共立エレショップ
【ラインレーザー通販サイト②】赤色1260円
|

【図4】ターンテーブル
|
|
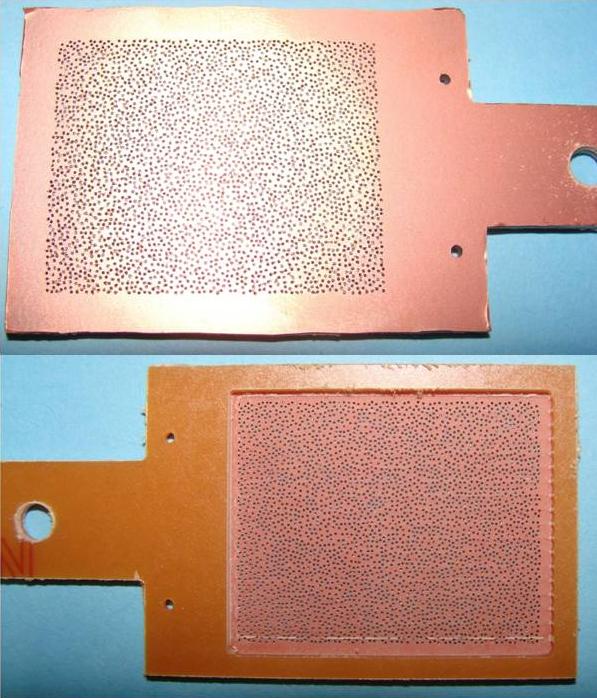
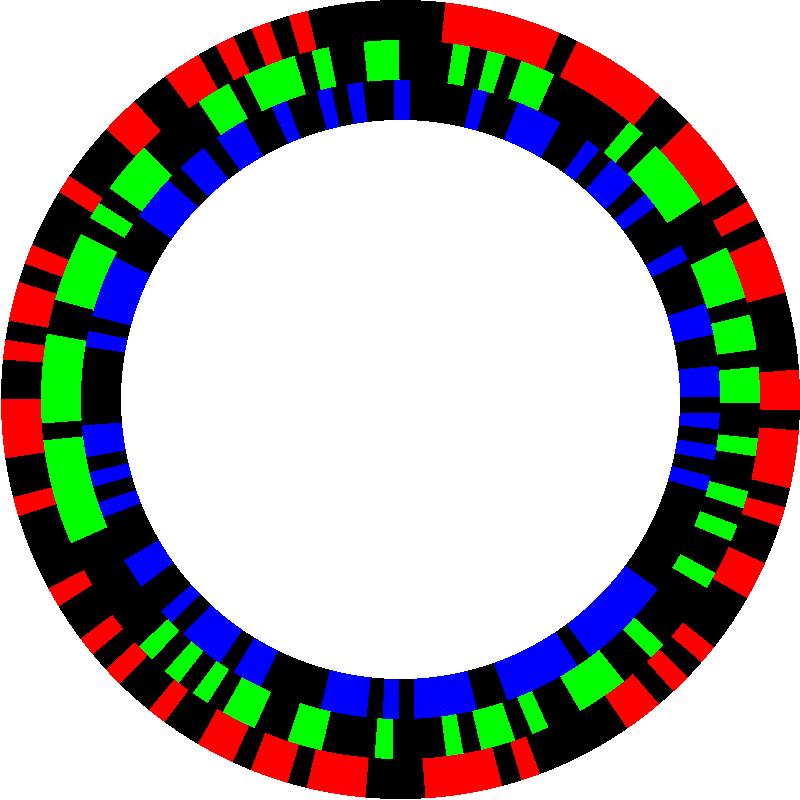
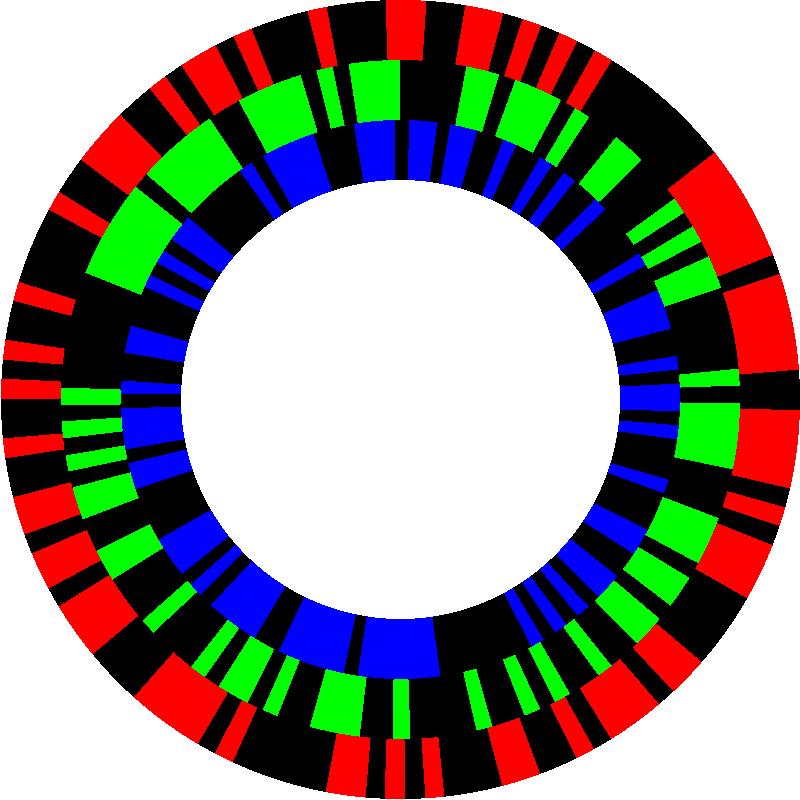
【ターンテーブル】
記事で書きましたように、ターンテーブルはCD(DVD)ケースを利用するのがお勧めです。Brotherの複合機やキヤノンの低価格プリンタにレーベル印刷機能を持った機種がありますので、角度検出パターンの印刷が簡単だからです。
ただし、中央の突起が邪魔にならないように、CDは2枚重ねにして接着します。
|
【図5】ターンテーブルタイプの3Dスキャナの一般的構造
|
|
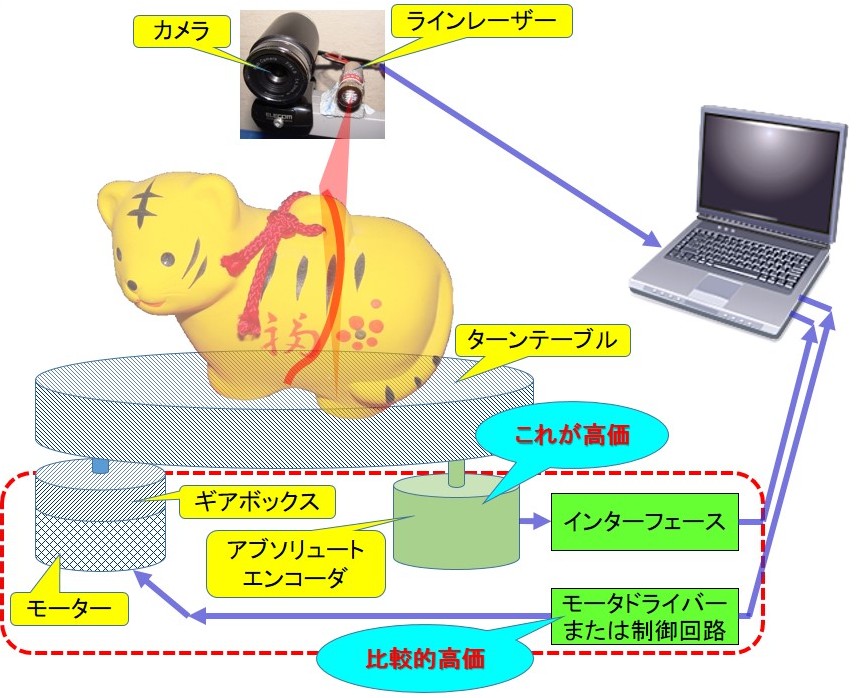
【ターンテーブルタイプの3Dスキャナの一般的構造】
良くあるターンテーブルタイプの3Dスキャナの構造を図5に示します。当然、自動測定を行うためにモーターでターンテーブルを駆動しているでしょうし、角度検出にはかなり高価な部品である回転角度検出センサ(アブソリュート・ロータリー・エンコーダー)が使用されています。このため、本体パソコンとの接続インターフェースが必要となり、システム価格は上昇してしまいます。個人レベルで使う場合に自動回転の必要性はあまりありませんし、精密な角度検出のためにはアブソリュート・ロータリー・エンコーダーを使う必要はなく、ラインビームの水平シフト量測定のためのカメラを使う方が得策だと考えました。
たったそれだけのことでモーターとギアボックス(あるいはステッピングモーター)とモーター制御回路、アブソリュート・ロータリー・エンコーダーとインターフェースを省略することができるのです。
|
【図6】
|
|
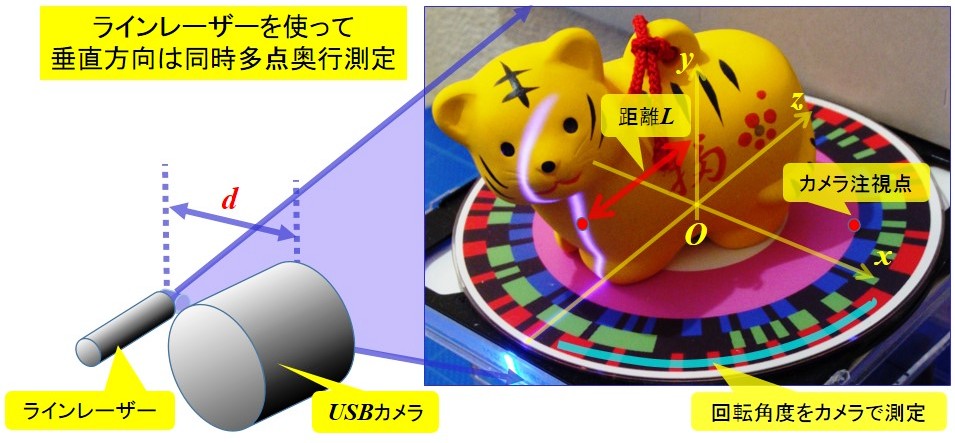
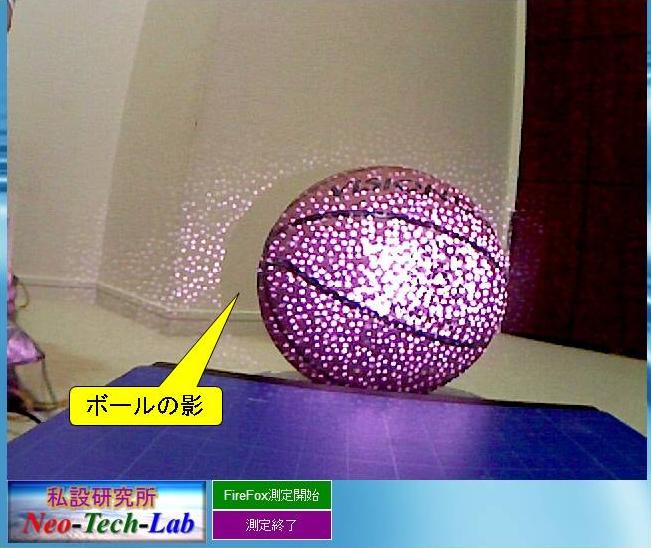
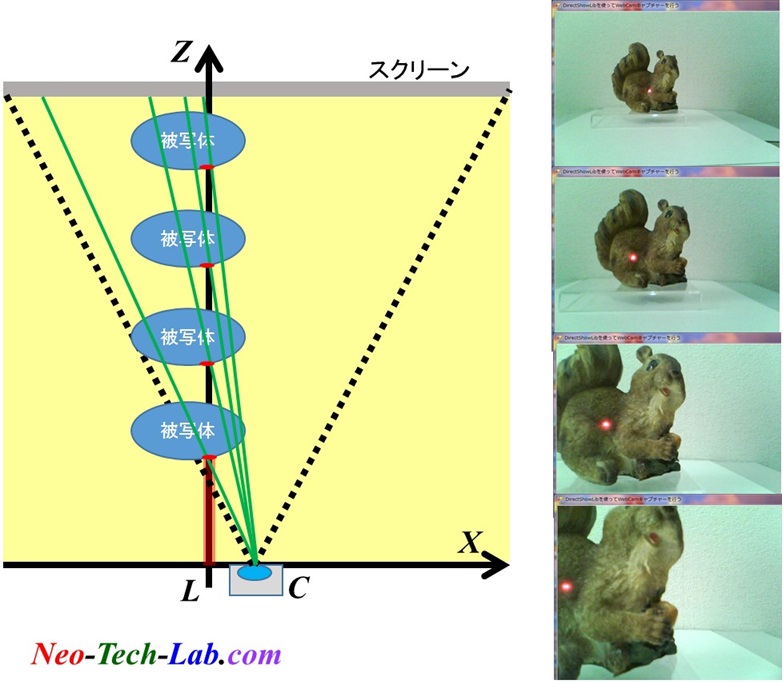
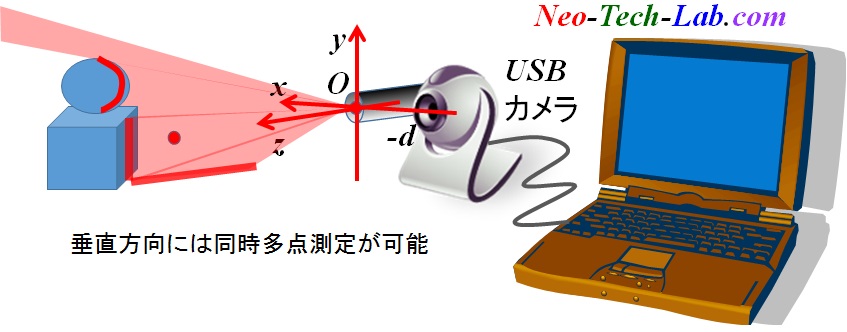
【y軸からの距離を求める】
ラインレーザーを用いることでy軸方向にスキャンライン単位に同時多点でy軸からの距離を求めることができます。
図6にラインレーザーの光切断ラインと位置関係を示します。
|
【図7】
|
|
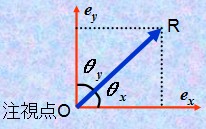
【座標の定義と考え方】
上述した記述を整理して図7に示します。
|
【図8】
|
|
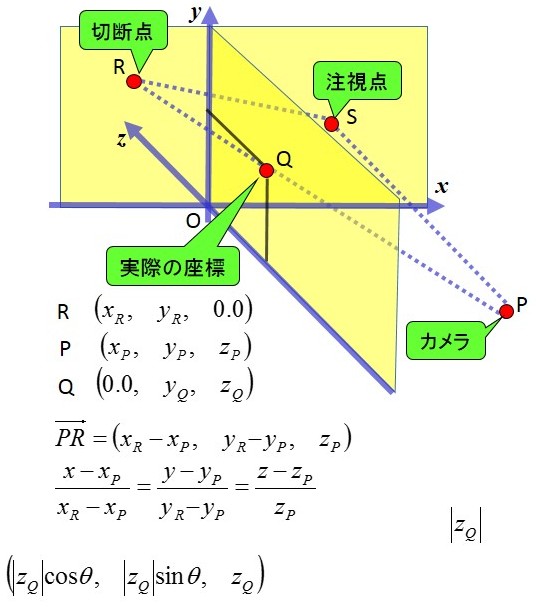
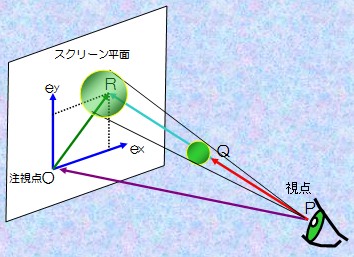
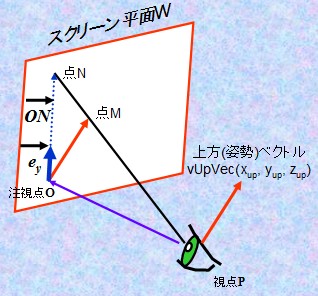
【3次元座標の考え方】
カメラの注視点は必ずスクリーン中央になります。座標原点Oの画素座標と実際の距離との対比からスクリーン座標上の距離を求めることができます。
図8に示すように、カメラPからスクリーン上に見えている切断光点Rの実際の3次元座標Qは点Rと点Pの3次元座標で与えられる直線PRとyz平面の交点なので簡単に求めることができるわけです。
あとは、印刷パターンから検出した角度θに基づいてy軸周りに回転させれば、回転体モデルの座標が得られるのです。
|










 ②
② ③
③
 ⑤
⑤ ⑥
⑥
 ⑧
⑧ ⑨
⑨