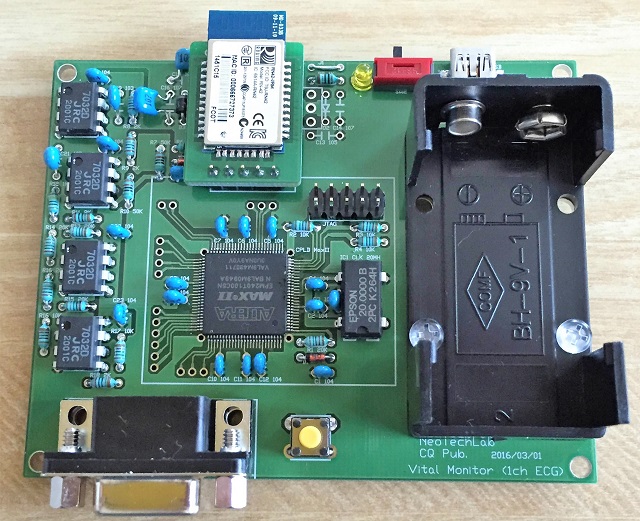
【生体計測学習キット】第1弾:心電計ボード
CQ出版から、近日発売予定です。製品単価は2万円前後の予定です。
詳しくは
CQ出版インターフェース誌のページをご覧ください。(近日公開予定のURL)
●
【心電計ボードのドキュメント】
【2016年9月号の記事訂正】
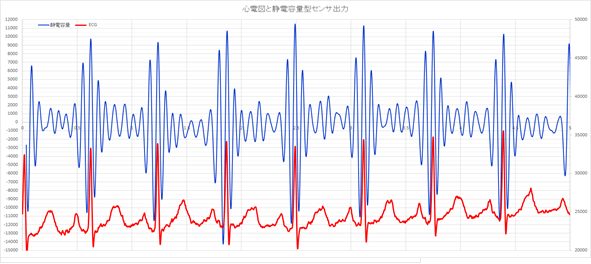
127ページの図2(c)の説明に関して修正します。
記事段階では心電図と静電容量型センサのフィルタ出力(心弾動)の
時相と波形変化を比較する意味合いで図に入れたのですが、編集段階
で、心弾動から心電図が得られるかのごとく誤解されてしまったらし
く、訂正をいたします。
両者は全く別の測定手段で同時測定した波形であり、心弾動から心拍
数を取得できますが、心電図には変換することはできません。
【Microsoft Visual Studio C#プログラム・ダウンロード】
①2016年4月号のC#サンプル・プログラム
【概要】
・ペアリング済みのBluetooth Comポートをスキャンして接続。
・分解能13bit, サンプリング速度800SPSで読込み、ΣΔ-A/Dコンバータの性質を用いて100000degits, 800SPSに変換する。
・逆行列を用いた基底遷移アルゴリズム(最小2乗法)のによるノイズ除去を行う。
・矩形波相関フィルタを用いてQRS群のピーク時相を検出し、R-R間隔から瞬時心拍数を求める。
【ダウンロード】
VitalMonitor_ECG_20160228.zip
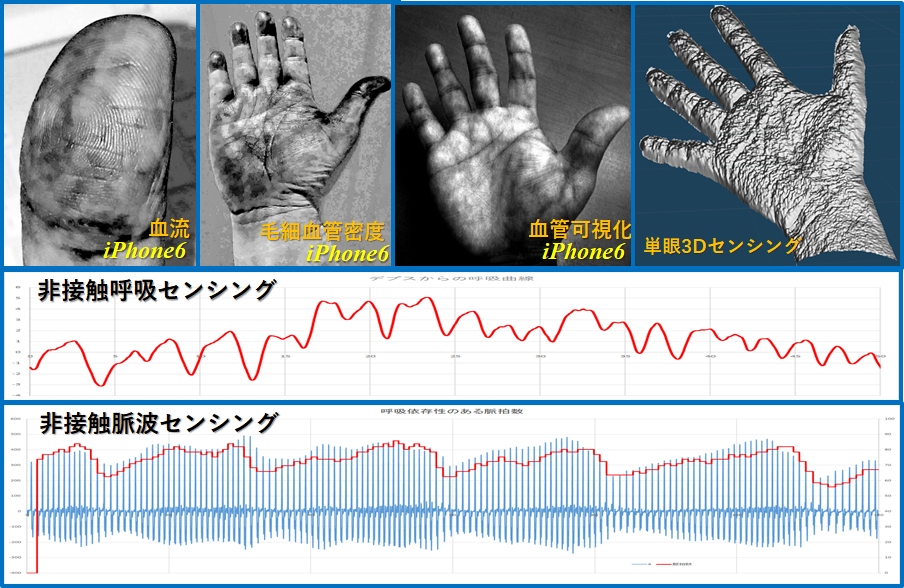
【生体計測実験ボードの読者プレゼント企画】
【第1回読者プレゼント企画】
インターフェース誌2016年1月号の12ページに応募方法の説明があります。2名様に生体計測実験ボードの試作版をプレゼントする企画があります。締切日は2015年12月25日です。
【第2回読者プレゼント企画】
インターフェース誌2016年2月号の裏表紙の裏面下に説明があります。2名様に生体計測実験ボードの試作版をプレゼントする企画があります。締切日は2016年1月24日です。
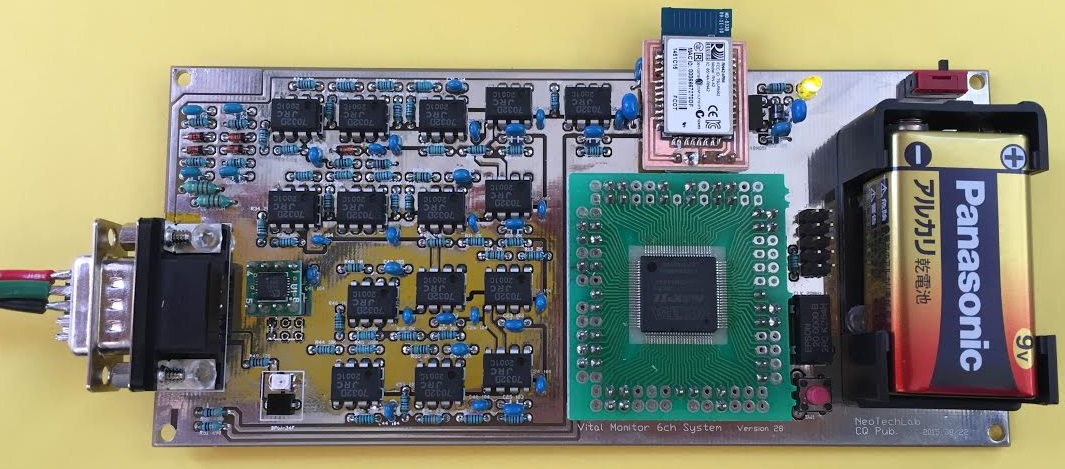
【図1】生体計測実験ボードの試作版Version28の写真

【図2】生体計測実験ボードのコマンド・フォーマット
115200bps, データ長8ビット, ストップビット1ビット, パリティーチェック無し
【Bluetoothで通信を行うための準備作業】『ペアリング』
本ボードは、前述したようにBluetoothでペアリングを行って使います。以下にBluetooth通信インターフェースを実装したWindows10デバイスでのペアリング方法を示します。図3に示すように、スクリーン下にあるタスクバーの右側に『新しい通知』アイコンがあります。これを右クリックすると図4に示すようなメニューが表示されます。『アクションセンターを開く(O)』をクリックして、アクションセンターを開くと図5のような表示状態になります。この中にBluetoothと書かれたタイルがあるので右クリックすると、図6のようなメニューが表示されるので『設定を開く』をクリックします。

【図3】タスクバーに表示される『新しい通知』アイコン
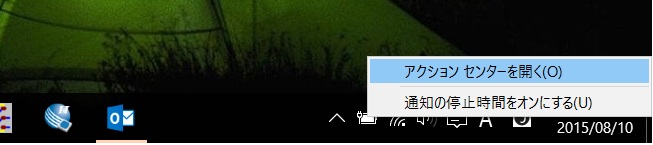
【図4】『新しい通知』アイコンを右クリック

【図5】『アクションセンターを開く』
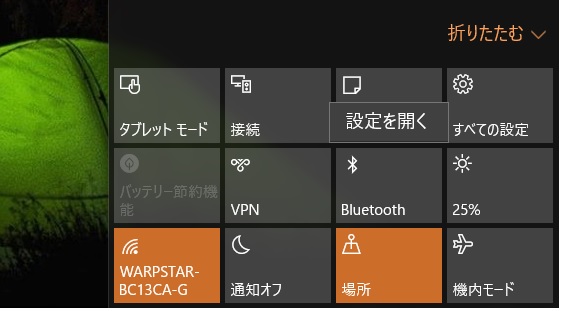
【図6】『Bluetooth』で右クリック
デバイス設定のうち、Bluetoothを選択すると図7に示すように表示されます。Bluetoothをオンに設定すると図8に示すようにBluetoothデバイスの検出が始まり、検出されたデバイスがペアリングの準備完了と表示されます。このとき、近くに存在するBluetoothデバイスがすべて表示されますので、注意が必要です。該当するデバイスを選択すると図9に示すようにペアリング・ボタンが表示されるので、クリックします。

【図7】『設定を開く』アイコンを右クリック

【図8】Bluetoothをオンにしてデバイスを検出

【図9】検出したデバイスをクリックで選択すると表示される『ペアリング』をクリック。
しばらく待つと、図10のようにそのデバイスのパスコードが表示されるので、『はい』をクリックしてペアリングの承認を行います。ペアリング処理が完了すると、図11のような表示状態になります。なお、誤って別のBluetoothデバイスとペアリングしてしまった場合には、ペアリング中のデバイスを選択すると『デバイスの削除』ボタンが表示されるので、クリックしてペアリングを解除します。
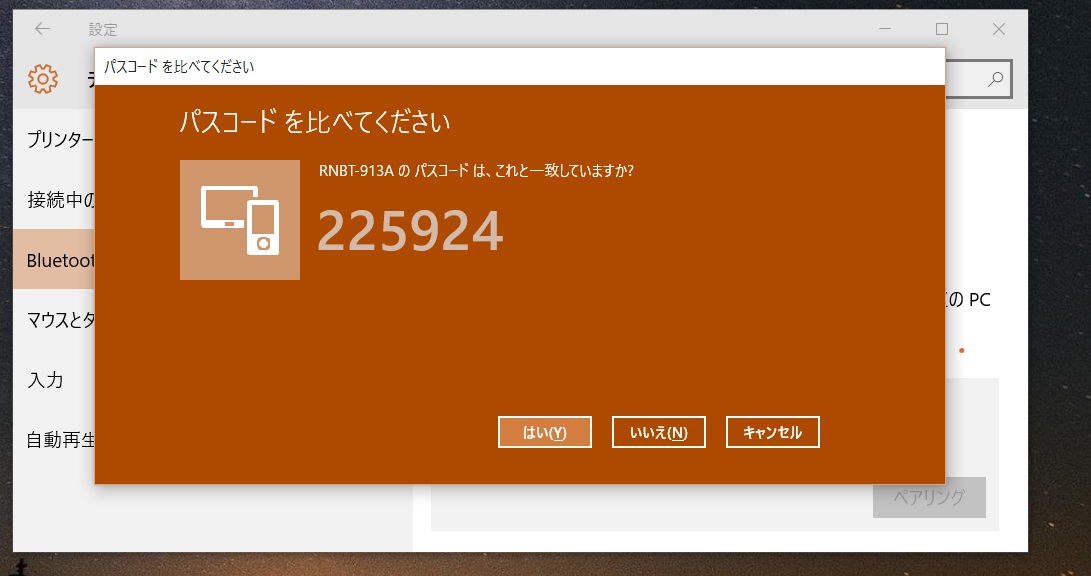
【図10】パスコードを『はい』で承認

【図11】ペアリング正常完了時
次に、ペアリングによって、シリアル・ポート・プロファイルで関連付けられたシリアルポート番号を調べます。デバイス設定で、プリンターとスキャナーを選択すると表示される画面の下に、図12に示すような関連設定の項目があるので、その中の『デバイスとプリンター』をクリックします。すると図13のように表示されます。その最下段に『未指定』の項目があり、ペアリングしたデバイスが表示されているはずです。これを選択して、右クリックすると図14のようなメニューが表示されますので、『プロパティー』をクリックします。図15に示すように、プロパティーのハードウェア・タブを選択することで関連付けられたシリアルポート番号を知ることができます。本例ではCOM5に関連付けられていることがわかりました。これをメモに書き留めて覚えておきます。
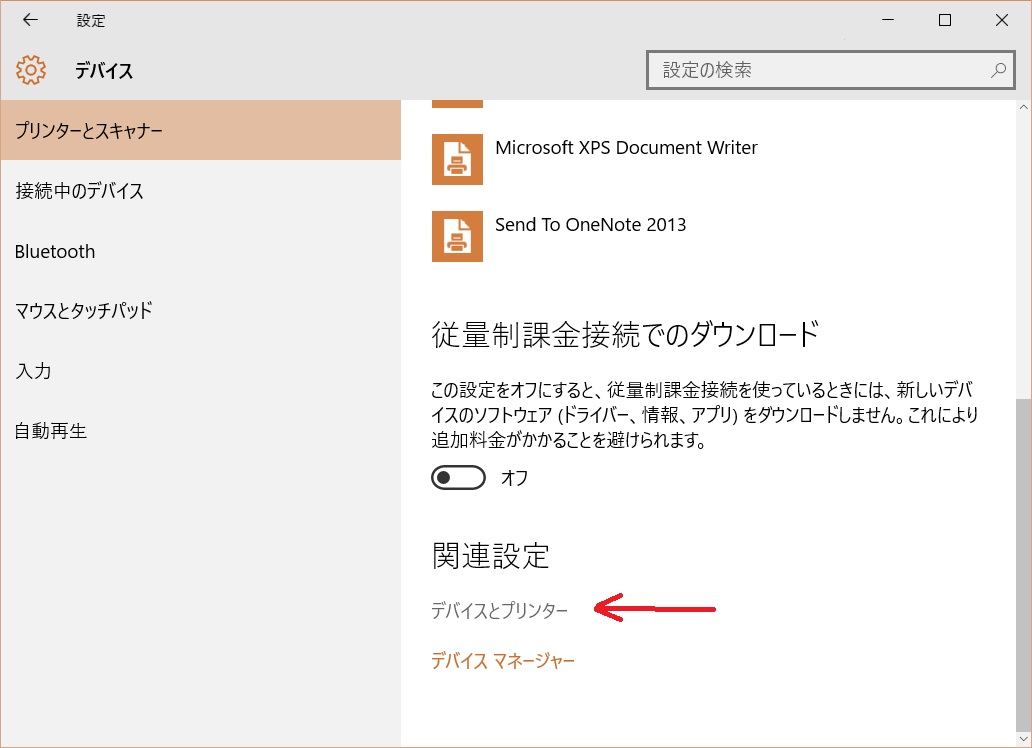
【図12】デバイス設定の『プリンターとスキャナー』を選択して関連設定の『デバイスとプリンター』をクリック

【図13】未指定項目にペアリングしたデバイスが表示されている
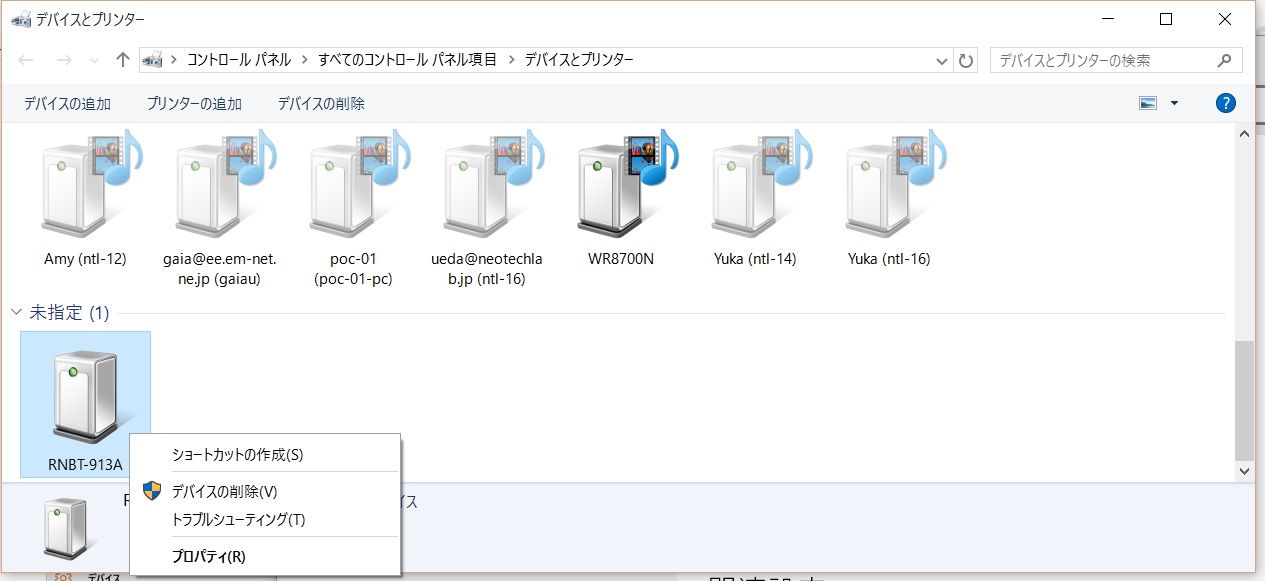
【図14】右クリックしてメニューを表示し、プロパティーをクリックする
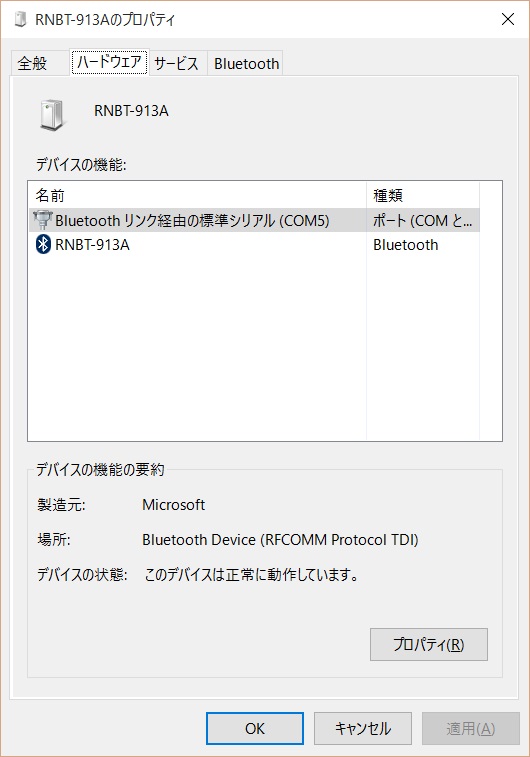
【図15】ハードウェア・タブを選択すると、関連付けられたシリアルポート番号を知ることができる
【ΣΔ-A/Dコンバータと逐次比較型A/Dコンバータの違い】
図16に製作したΣΔ-A/Dコンバータの概略回路図を示します。この回路は2つの入力を加算して積分する積分器と、積分器出力と基準電位1.65Vを比較するコンパレータと、5MHzのクロックが供給されコンパレータ出力を保持するレジスタと、図に記入はされていませんが、そのレジスタの出力がHighレベルの個数を50000クロック分(16bit, 100SPS時)あるいは6250クロック分(13bit, 800SPS)カウントするカウンタで構成されています。カウンタはダブル・バッファで構成されているので、連続してA/D変換を行うことができます。
このΣΔ-A/Dコンバータには逐次比較型A/Dコンバータにはない特徴があります。逐次比較型A/Dコンバータには量子化誤差が必ず伴います。例えば、入力電圧範囲が0.0V~3.3Vである 12bitのA/Dコンバータは4096階調ですから、1階調の幅は806μVになります。この階調幅以下の情報は失われてしまうので、サンプルをn個加算平均しても量子化ノイズは1/√n にしかなりません。64サンプル使っても1/8にしかならないのです。
一方、このΣΔ-A/Dコンバータは、アナログ入力を-S(t)、1ビットA/Dコンバータで量子化した変換値O(t)の加算値e(t)=-{S(t)-O(t)}を積分( )をコンパレータに供給して、常に累積加算誤差が1ビット未満になるようにしています。この結果、nクロック分だけカウントしたA/D変換値(分解能nデジット)の量子化誤差は1デジットになります。また、連続するサンプルを加算した場合にも累積加算誤差が1デジット未満になるようになっているので、nクロック分だけカウントした連続するA/D変換値(サンプル)をm個加算平均した場合にはnmデジットのうち量子化誤差は1デジットになります。
ΣΔ-A/Dコンバータにおいてn=13である場合には13ビット(6250階調)のA/Dコンバータという事になりますが、8個連続したサンプルを加算平均した場合には6250×8階調=50000階調(16ビット)のA/Dコンバータとなり、量子化誤差は1デジットとなります。
これに対して13ビットの逐次比較型A/Dコンバータで取得したサンプルを64個加算しないと数値は16ビット分になりません。すなわち実質的には16ビット分の精度を得る為に8倍も多いサンプル数が必要になってしまうのです。
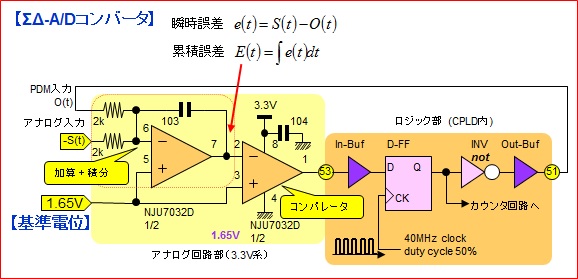
【図16】ΣΔ型A/Dコンバータの構造