|
|
|
||
当サイトはSPAM対策等のためJavaScriptを使っています。
JavaScriptの実行を可能な状態にしてご利用下さい。
Please enable the execution of JavaScript!


【Vocaloid初音ミクとMikuMikuDanceという驚愕のソフトウェア】 |
||
|
【リンクフリー】 私設研究所ネオテックラボ Neo-Tech-Lab.co.uk 【記載者】 上田智章 ☆Tomoaki Ueda☆ NTLMMD |
 |
|
ここにチェックボックス型外部コンテンツ・メニューが入ります。 | ||
|
|
|
||
|
【トップ・ページに戻ります】 |
|
■■■記載日2010年02月14日■■■ 【ついにヘブライ語でチャットするはめに(続き)】 なんだかんだで、もう50回弱ヘブライ語のメッセージを送った。いやぁ、日常会話程度ならなんとかなるもんだね。Google凄いなぁ。英会話が苦手な人間が全然文法もわからない言語で現地文字さえ読めないのにチャットできるんだから。とにかく会話が成立しているということに驚く。 以前にPanoramioでスペイン語、ポルトガル語、イタリア語、ギリシャ語、オランダ語、ポーランド語、トルコ語、ロシア語、フランス語、セルビア語でも短い会話の経験はあるにはあったが、YouTubeのメッセージシステムでここまで濃い内容のチャットができるとは思わなかった。 取り敢えず、aviファイルへの落とし方のチュートリアルを作成する必要ができてしまった。非英語圏の人間にとっては英語の動画では速すぎて理解困難のようだ。ドキュメントの方がいいようだ。これはMikuMikuDanceがコンパクトに様々な仕様に対応しているが故の問題なのだろう。オプションメニューが豊富過ぎて、Windowsでaviに落とす際にどのオプションをどんな手順で使えばいいのかちょっとわからないだけのようだ。 私はマニュアルとか読まない困った性格なので気にしたことはなかったのだが、選択肢が多いと試行錯誤も大変ということなのだろう。 ステージの表示方法とか、アクセサリの持たせ方とか、作り出したらかなりの量になるかもしれない。どういうカテゴリーで作るか考えなくては... ところでWeb Agent MikuをマルチリンガルにしようとGoogle Translate APIを検討してみたが、こっちはダメだ。使い物にならない。どうしてなんだ? 一方で、マルウェアに感染したサイトへの潜入調査、他サイトに対するクロールによるサイト・パフォーマンス調査等の実戦に試験的に投入してみたらこっちは結構使えそう。 ■■■記載日2010年02月11日■■■ 【ついにヘブライ語でチャットするはめに】 YouTubeでのMikuMikuDance質問者の国籍が段々と多様化してきている。イスラエルからも質問が来た。英語で書かれてもよく意味がわからないのでヘブライ語でチャットするはめになった。当然、ヘブライ語がイスラエルの公用語だということも昨日初めて知ったくらいなので話せるわけはないのだが、こんなときにはGoogle Translatorの上手な使い方が武器になる。gmailシステムはヘブライ語の左方向記述に対応しているので助かる。どうやらアニメの聖地日本に憧れていて'巡礼'旅行する際の事とかいろいろ他にも知りたいようだねぇ。随分と活動的だな。 そう言えば、前にドイツのとある大学を訪問したとき、日本語をちょっとだけ話せるドイツ人に合ったことがある。(会話は英語で済ませたが)彼は日本にも来たことがあると話した。てっきり留学か観光だと思ったら、秋葉原とビッグサイトに行っただけだという。この訪日のために日本語会話サークルに通いつめたのだと言う。全く凄い根性だな。 あっ!そうだ。オーストリア国籍のM君もメード喫茶に行ったとか言ってたなぁ。もはや海外からは主要な文化という認識なんだろうな。 複数の海外MikuMikuDanceファンから聞いた話では、将来日本(何故か札幌と浜松)に住みたいんだそうだ。『札幌はわかるがどうして浜松?』と聞いたら『もうひとつの聖地』という回答だった??うーん、おじさんにはとっても濃いぃ話だよね。 オランダ、ベルギー、ポーランド、ロシア、イタリアからもサイトに熱心な訪問があるし、ちょっと怖い展開だな。まぁ、フランス語とドイツ語とフィンランド語とタイ語を除けば主要30ヶ国語ならなんとかなるかも。Googleは偉大だ。 |
|
 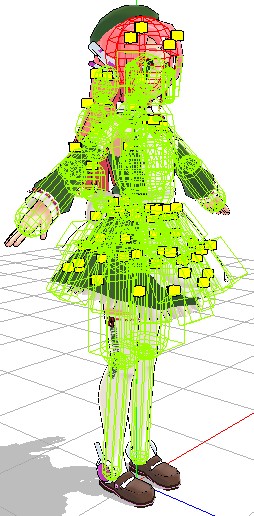 オリジナルの桃音モモ モデル。スカートの剛体は互いに接続されず1点固定になっている。スカートがひらひらと動く秘密がこの1点固定だ。その代わり、足を開き過ぎるモーションではスカート干渉(貫通)が発生する。反対にジョイントでスカート剛体を互いに固定する方法だと干渉は発生しにくいがひらひらとは動かない。 いや訂正。どちらかと言えば、ひらひらと動くスカートの方が断然魅力的だ。これはかなりこだわりのモデルなのかも。 |
■■■記載日2010年02月08日■■■ 【PMD改造モデルを貰った件について】(桃音モモの改造モデル) YouTubeで知りあったアメリカの女の子から桃音モモの改造モデル( ちょっとモーションを付けて遊んでみた。んー。ちょっとスカートの動きがおかしいかな。物理エンジン用エディタを起動して定義状態を確認してみたところ、ジョイントで固定し忘れたスカート剛体が存在した。折角だから、後でジョイント付けてあげるとするかな。(右下は単なる剛体表示モードの例) ちょっと比べてみたが、物理エンジンの適用方法についてはみんないろいろなやり方があるようですね。カスタムモデルならではの楽しみ方なんだろうね。 あとPanoramioでもユーザー間の交流はあったけど、YouTubeでのMikuMikuDanceユーザーの交流は年齢層が若いせいもあるだろうが、その比ではない。活動の幅もとても広い。OtakonのCosplayerコンテストに出場する人もいたりする。この場合、家族総出で役割分担したりするところが凄い。そのせいか、いろいろな相談が持ちかけられることが多い。実にアクティブだと思う。全然英会話はできないし、自信もないが、メッセージ交流だと結構通じるもんだ。不思議。やっぱり中学・高校の英語教育って間違ってるんじゃないの? 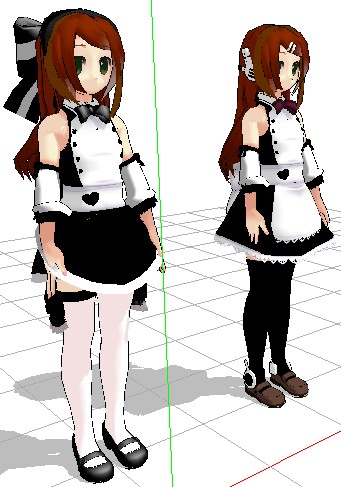 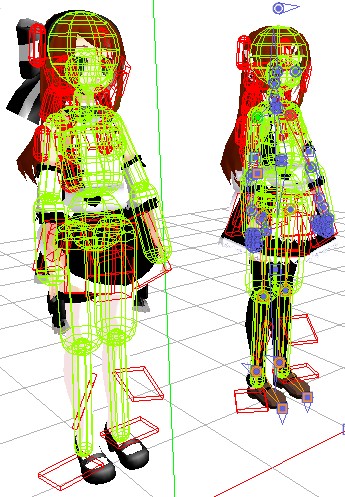
|
 新機能セルフ・シャドゥ効果を適用した画像 Russel Square Gardens, London 大英博物館のすぐ近く  光源位置に視点を持っていくと(当然)モデルには影はない。このビューで陰面処理されて隠れたポリゴンは影ポリゴンと考えることができる。 |
■■■記載日2010年04月15日■■■ 【MikuMikuDanceのセルフ・シャドゥ】 MikuMikuDanceに実装されたセルフ・シャドゥに関してVPVPにニコニコ動画のチュートリアル動画があった。ドキュメントを探していたのだが、ここにあったとは。眼に入っていなかった。やだねぇ。 この説明を見る限りポリゴンモデルやアクセサリが作る影が他のモデルにも反映するようにしたということになる。 セルフ・シャドゥの原理がどうしても気になり、頭から離れなかった。風呂に入ってひらめいた。 1) 先に光源位置を視点座標にして3D陰面処理ビューを求める。 2) 頂点z値が隠れて見えない位置のポリゴンは他のポリゴンが作る影に入っていることになる。 3) 三角形単位に判定するなら、3頂点のうちz値判定で隠れた頂点が1つ以上あればそれは影ポリゴンと判定することができる。 4) 影ポリゴンに関しては光源計算を放射光(emissive)と環境光(ambient)だけ行えばよい。(鏡面反射光、拡散反射光は計算不要。) 但し、MMDでは環境光(ambient)だけを取り扱っているとのことらしい。 【注】精密に影を求めるなら、これをピクセル毎に行えばいい。納得。高速グラフィック・アクセラレータが実装された機種なら セルフ・シャドゥ効果の出た画像を見てこの仮説を検証してみる。おぉ、リンの顔にできた影の形状から見て確かに三角形単位に判定していそうだ。 MikuMikuDanceでやれるかどうかは別としてさらに光源を複数の点で近似すれば、ぼやけた影の表現が可能なはずだ。漸くインターネットで見た木陰の影の製作方法が少しイメージできた気がする。 |
|
■■■記載日2010年02月04日■■■ 【MikuMikuDance Version7.00リリース】(ARToolKitについて) 昨日、2月3日にMikuMikuDanceのVersion7.00がリリースされていたのでダウンロードしてみた。 実装されていた『セルフシャドゥ』の数学的な原理がわからなかったので、気分転換のため今日は少しARToolKitの方を調べてみる。ウェブ・カメラからフレーム単位に画像を切りだして、予め定めたしきい値で2値化画像を得る。詳細は不明だが、多分微小孤立点を除去して、スキャンライン単位に探索した上でマーカーの4頂点座標を抽出。予め登録されたマーカーは反転2値化画像で保存されているようだ。マーカーを抽出した4点に合わせてテクスチャーマッピングのように変形マッピングして排他的論理和(XOR)をとり、全ての画素値の合計が最大となる回転位置(0度, 90度, 180度, 270度)の対応頂点を求める。それから抽出した4頂点の位置関係に近くなる法線ベクトルを求める。と、こんな処理のように推察された。最後の法線ベクトルはひょっとすると連立方程式を解けば求められるかも。もし想像通りなら必要なルーチンは大体作れそうなので、一度、試作してみるかな。  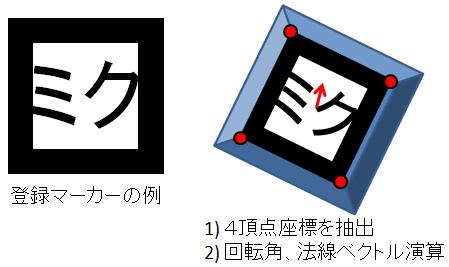  |
|