|
|
|
||
当サイトはSPAM対策等のためJavaScriptを使っています。
JavaScriptの実行を可能な状態にしてご利用下さい。
Please enable the execution of JavaScript!


【私設研究所】 Neo-Tech-Lab.com 【特設ページ】~同期検波やSpread Spectrum Sensorについてちょっとだけ~ |
||

|
【リンクフリー】 私設研究所ネオテックラボ Neo-Tech-Lab.co.uk 【記載者】 私設研究所Neo-tech-Lab 上田智章 |
作成日 2011/09/26 |
ここにチェックボックス型外部コンテンツ・メニューが入ります。 | ||
|
|
|
||
|
■■■質問日 2011/09/26 (Mon) 14:41:30■■■ 【赤外線脈波の検波 - カンコーヒー】 初めて投稿させて頂きます。 以前の投稿(2009/05/07)で赤外線脈波のノイズ除去について、記述があり大変興味を持って読ませてもらいました。 その中で、パルス駆動を用いて同期検波回路による方法が紹介されていました。 その原理が分からず勉強しながら、悪戦苦闘しておりますが、体動に強い脈波センサを作りたいと考えているところです。 心拍数を取り出すだけでなく、波形データとして取り込みたいと考えています。 さて、同期検波については、下記 www.aka.ne.jp/~deguchi/hobby/radio/synchro.pdf に助けを借りて、浅い理解ができましたが、つまづいてしまった点があり、この場で教えて頂きたいのですが。 ラジオ電波などでは 受信波=搬送波×信号+ノイズ ということで、信号は乗算です。 そのことによって、ノイズ成分とかけ離れた高い周波数領域(パルス周波数や搬送波周波数)に一度シフトでき、 その帯域にハイパスフィルタをかけて、信号を取り出せる…と理解しました(搬送波周波数に対称な分布)。 しかし、光電脈波では 受信光=搬送光(パルス光)+信号+ノイズ で、受信光は単純な加算関係になるのでは、と思いました。 この場合、信号(脈動)とノイズ(体動、環境光)が近いことからフィルタでは分離できないような気がしております。 何か理解が抜けているところや、検波方法の工夫がありましたら、ご指導いただければ幸いです。 乱筆乱文の突然の投稿ですが、よろしくお願いします。 |
|
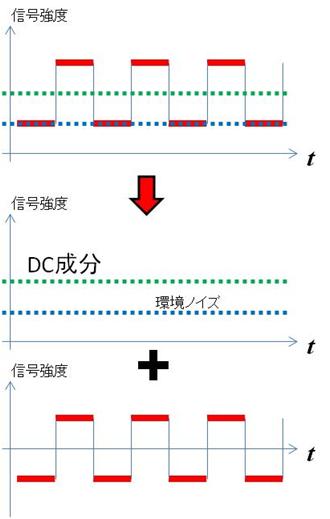
■■■回答日 2011/09/26 (Mon) 22:44■■■ 【同期検波について】 公共機関の方のようなのでお答えします。 ここでは簡単の為、光学センサで微弱光計測の際に起こりがちなショット・ノイズについては説明せず、十分光量がある状態での計測での説明を行います。(計測回路技術本1冊を書く根気はとてもありませんので。) 図1をご覧ください。 バックグラウンドノイズである環境光ノイズを概ね直流成分と考えれば、パルス駆動(ここではデューティーサイクル50%とします。)光源のON/OFFは最上段のように計測されるはずです。これは結局直流(DC)成分と矩形波交流成分に分離することができます。 回路的には、High Pass FilterやDCサーボという心電計や脳波計などで採用される回路で容易に行えます。 実際には、バックグランドノイズには変動があります。環境光の強さの変化、蛍光灯や白熱電球などの照明の交流雑音などです。白熱電球では商用周波数50Hzの場合には毎秒100Hzの変動がありますし、ちらつき防止のインバーター蛍光灯では数10kHzの明暗変化がノイズとして重畳します。 赤外線脈波計の測定に直流光源を用いると、脈波変動は2Hz以下の世界なので周波数が重なり、ノイズと格闘するはめになってしまいます。 図1のようにパルス駆動を行えば、脈波の変動は矩形波の振幅変化になります。言わばパルス駆動の周波数をキャリア周波数とするAM変調がかかるわけです。 つまりキャリア周波数に脈波変動の『うなり』がかかるわけです。 これを周波数軸で表現すると図2に示すようになります。 環境ノイズはDC成分の変動なので、蛍光灯のノイズを考えても数10kHz以下の帯域に存在します。 これに対して脈波変動はキャリア周波数の脈波周波数成分の『うなり』となって現れるので、キャリア周波数を十分環境ノイズの周波数帯域から離してやることで周波数的に分離することができるのです。もっとも、パルス駆動の場合は脈波の振幅変化に対応して平均値も変動するのでDC付近にも変動成分が重畳しますが。 つまり、Band Pass Filterを使って有効な成分だけ抽出することができるわけです。 駆動周波数は既知ですから、Direct Digital SynthesizerまたはDirect Frequency Loopで駆動信号をgenerateするときに検波用信号を位相をずらして発生しておけば簡単に同期検波を行うことができます。 なので、趣味の電子回路工作程度ならDC光源で計測しますが、通常の光計測では同期検波回路が採用されるのです。 空気の清浄度を測定する塵埃センサなどが代表的な応用例になります。 ここまで宜しいでしょうか? (多分ご質問の範囲はここまでで十分かも) 同期検波を用いても最後はS/N比の問題が浮上してきます。 観測帯域をW[Hz]、ノイズ電圧密度をVn[V/√Hz]とすれば、ノイズ振幅NはVn・√W [V]となります。 検出感度はセンサの信号成分Sとノイズ振幅Nの比で決定されると一般に理解されているようですが、実はそうではありません。 以下は国内文献で見かけないし、最近東工大から学会発表で公表している方法です。情報理論を使えばノイズに埋もれた状態でも信号が検出できる場合があります。 C.E.Shannonのチャンネル容量の定理によれば、ある通信路で誤りなく伝送することができる情報量C[bit]は図3に記載された式で与えられます。 W[Hz]は通信に使用する帯域幅、Sは信号電力[W]、Nはノイズ電力[W]です。 式から明らかなように、S/N比を向上しても情報量は増加しますが、帯域幅を増加しても情報量を増やすことができます。 この式は現在CDMA方式の携帯電話が普通に使っているスペクトラム拡散通信方式の原理を示しており、惑星探査衛星が木星や土星から微弱な電力で鮮明な画像を送ってこれるのもこの通信方式のおかげなのです。 『スペクトラム拡散通信方式』は魚雷制御のための軍用通信方式として誕生しました。民間で知られるようになったのは1978年に京都で開催されたCCIR会議が最初です。将来の多元接続通信方式として紹介されました。 ここで国内の研究者のほぼ全員が『通信方式』と理解してしまったらしく、計測でもこの式が使えると理解されている方は見かけません。多分、国内メーカーでご存じの方は殆どいないでしょう。 【参考文献】ジャテック出版『スペクトラム拡散通信方式』 理解し易くするため、m系列符号による多元接続などの説明は省略し、概念だけお伝えします。 脈波計測の場合で説明します。脈波の情報帯域はせいぜい2Hz、変化の激しい成分の再現性を考慮しても100Hzもあれば十分でしょう。 対してLEDや受光素子の応答速度は非常に高速で10MHzの帯域を持つものも多いでしょう。ところが通常のアプリケーションではこの帯域の殆どが使われていません。 これを使うのが、Spread Spectrum Sensorです。計算が面倒なので情報帯域幅を10Hz、測定に使用する帯域幅を10MHzとすれば、100万チャンネル取れることがわかりますよね? 情報帯域の100万倍の帯域を利用して測定するという事は、単純に同時に100万個のサンプルを同時測定できるのと等価です。サンプルの平均値を撮ればS/N比を改善することができます。 N個の平均を取れば√N倍に改善されるので、上記の例ではS/N比は同期検波の1000倍に向上できるのです。 この技術を使えばセンサの高感度化を電子回路技術で達成することができます。 デバイス研究では倍の感度のデバイスを生みだすのは大変ですが、デバイスが本質的に広帯域で、情報帯域幅がそれに比して非常に狭い場合に電子回路技術で高感度化が達成できるのです。 |
 【図1】 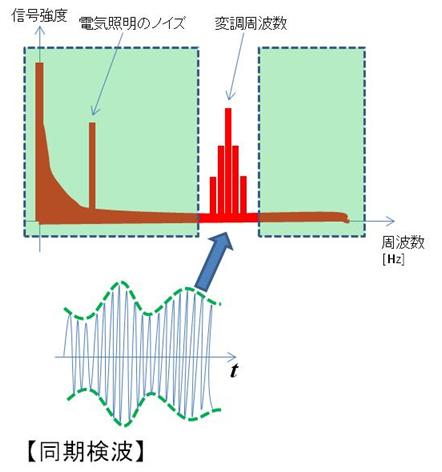 【図2】 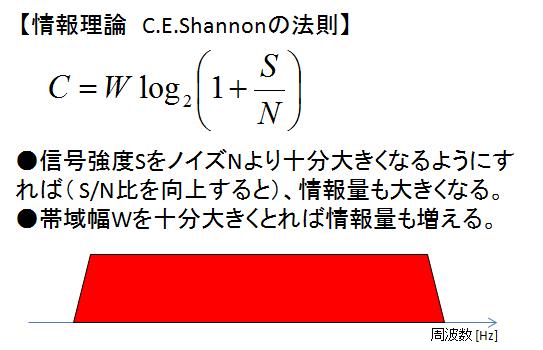 【図3】 ≪注意≫Spread Spectrum Sensorの具体的回路事例は受託研究のクライアントにのみ開示しています。ご了承ください。 |
【追記: Microsoft社のKINECTセンサのデプスカメラ】2012/03/24記載Microsoft社のモーションキャプチャ・センサであるKINECTセンサに実装されているデプス・カメラもまた、 スペクトラム拡散通信方式で利用されているm系列符号に代表される乱数の数学的性質を利用したものである。 2次元ランダムドット・パターンを持ったプロジェクターで被写体に赤外線を照射し、これを赤外線カメラで撮影している。 プロジェクターとカメラの視差距離dのために被写体に投影されたランダムドットの位置が深度によって水平方向にずれる性質を利用している。 詳しくは、【KINECT】『デプスカメラを自作してみた』を参照の事。 (Kinectのデプスカメラの基礎的な動作原理については、2012年7月10日に公表を予定しています。) このように、スペクトラム拡散技術は、通信だけでなく、センシング、メモリ(当サイトのWeb Agentの広域拡散記憶)、AI等に幅広く応用できる技術なのだ。 宇宙・航空・軍事技術で利用されているので情報が表には出にくいが、1978年時点でかなり広範に利用されていた。 KINECTセンサが開発された事は、民生で使っても差し支えないほど、宇宙・航空・軍事技術が一世代以上進歩した事を示している。 余談だが、Kinectはまだ1978年~1985年段階の処理技術しか使っていないように思える。 それは本来この技術は近距離ほど高精度に測距できるはずなのにもかかわらず、KinectはDefaultモードで800mm~4000mm、 Nearモードでも400mm~3000mmと検出可能範囲の制限を行っていることで明確にわかる。 つまり、探索負荷が存在するアルゴリズムを採用しているので、探索範囲を絞ってリアルタイム性を維持しているわけだ。 1989年初期の技術でさえ、そのような必要はないのだが。おそらく数学的知識が不足しているのだろう。 ●【特許2718222号】『距離測定方法、その装置および相対位置測定装置』(出願1989年) ●【特許2803237号】『データ伝送方法およびその装置』(出願1989年) 即ち、より演算負荷を低減できるはずだと考える。 Kinectには他にも改良可能な部分が多数散見される。  【写真】XBOX-360用のモーションキャプチャとして開発されたKINECTセンサ 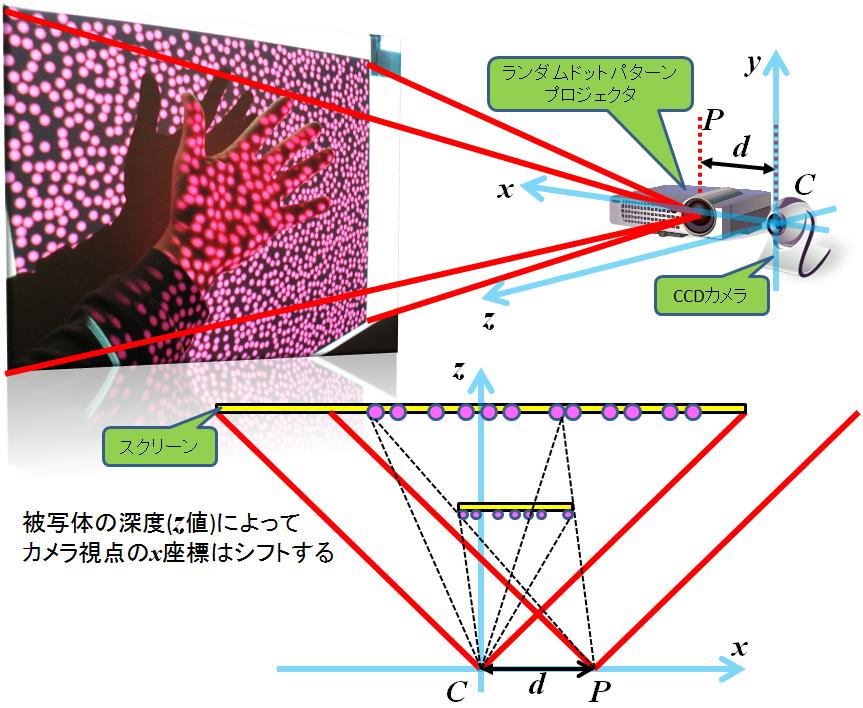 【図】KINECTセンサの画素ごとの深度情報(z座標値)を検出するDepth Cameraの概略構造 |