Congratulations! I am delighted to notify you that the Kinect for Windows team is offering you (“○○○ □□□□ (Individual)”) a place in our upcoming developer kit program :-) As you know, this program will grant a select number of developers exclusive access to pre-release hardware and software.
We received thousands of applications to the program. Due to the high volume of interest, we won't have enough alpha hardware to admit everyone who applied to the program. Over the next few months, we will continue to notify successful program applicants.
We're convinced that your combination of passion for Kinect, technical expertise, and the creativity of your idea will make you an awesome contributor to the evolution of NUI.
We are still targeting November for the release of the hardware and SDK. Running the alpha SDK and sensor will require a desktop-class machine with a modern GPU and USB 3.0 controller card (more deets on this to follow). Look for another email from us in October to finalize your program onboarding and to pre-order your developer kit.
I'm looking forward to working with you and seeing what you create with the new-generation Kinect.
Sincerely,
■■■■ ▲▲▲▲
Developer Community Manager
Kinect for Windows
Yahoo! 嬉しい!もうすっかり諦めていたのだが良かった。11月にハードとSDKの供給があるらしい。これでいろいろ楽しみだ。(^_^)
個人資格での応募※なのでGeekぶりを強調したつもりのアピールにしたのだが、返事がなかなか来なかったので実はちょっと後悔していたんだけど...取り敢えず良かった。(○^_^○)
【Photo 1】次世代Kinect for Windows (K4W) TOF赤外線プロジェクタ、RGBカメラ、Irカメラは一か所に集められているようだ。
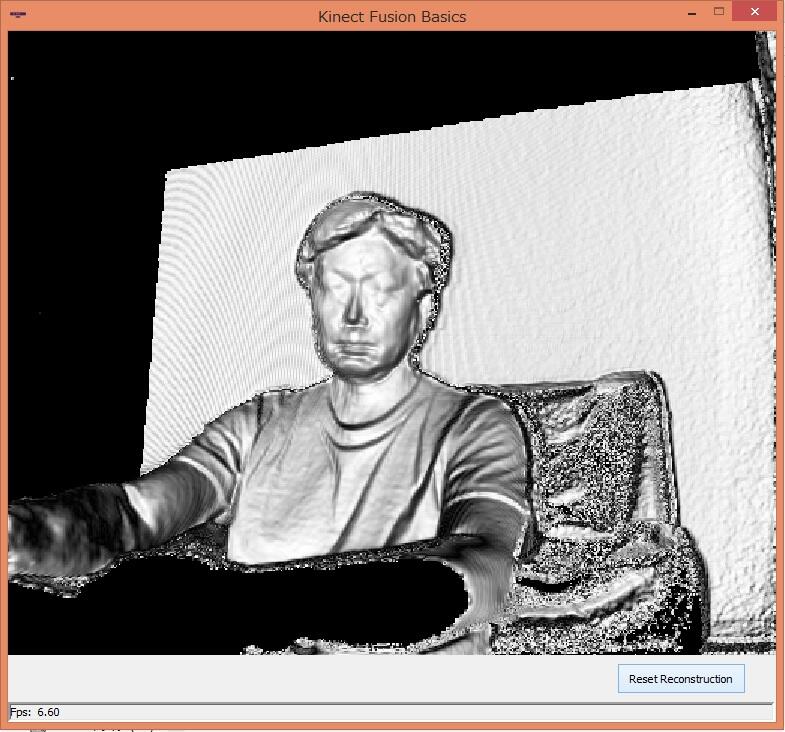
【Photo 2】デプスカメラの方式はTOF: Time of Flight方式。解像度は約2.5倍。手前の顔の表情だけでなく、後方のソファーのクッションまではっきりと撮影できており、真にmmの精度はあるようだ。但し、カウチ問題と呼ばれる画面周囲部分が鮮明にとれない問題はあるようだ。
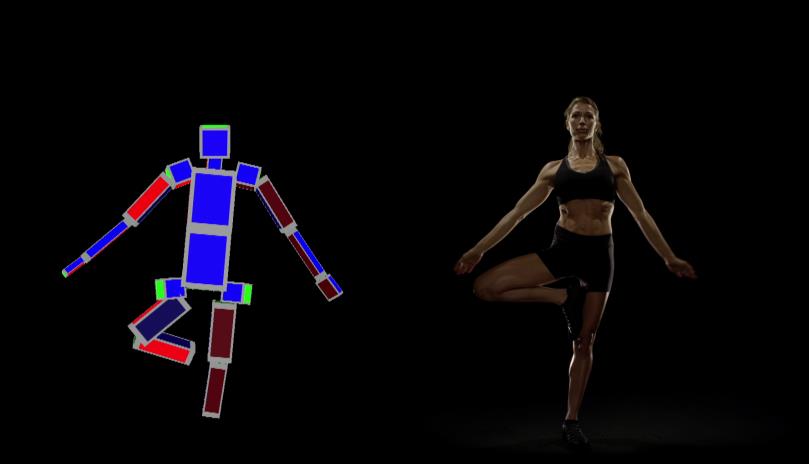
【Photo 3】骨格に親指とそれ以外の指部分の関節が追加されている
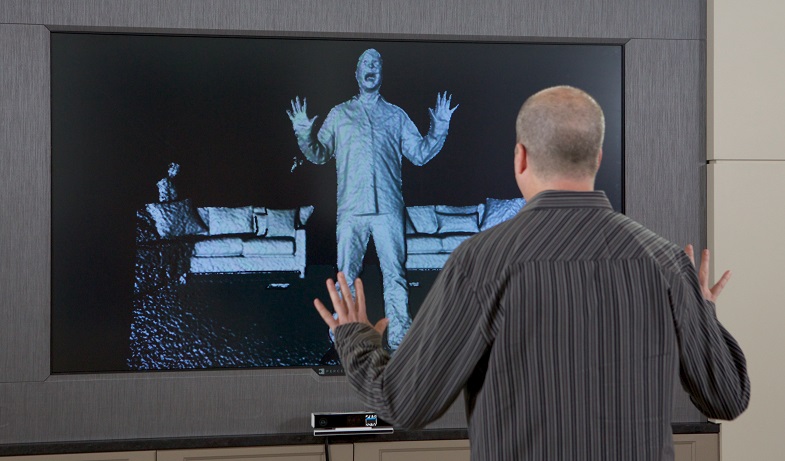
【Photo 4】ボーンだけでなく面の法線も持っているので顔の向きも追尾できる
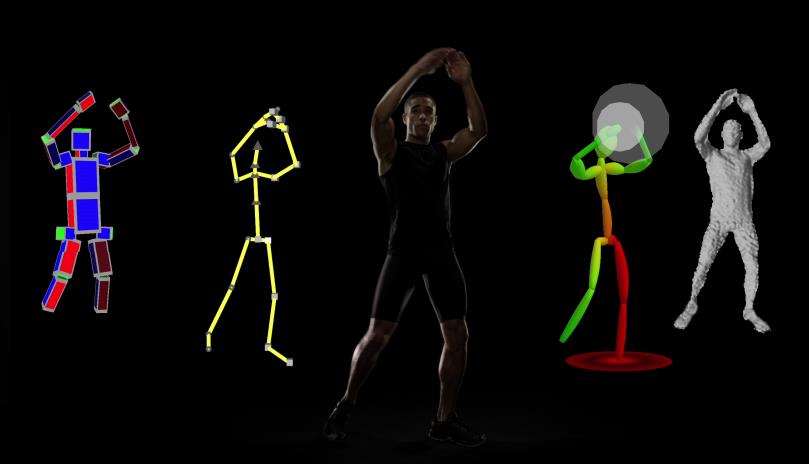
【Photo 5】物理エンジンも搭載。筋肉にかかる力や与えるエネルギーが可視化できる『スカウター』(Muscle + Force)モード
【Photo 6】次世代Kinect for Windows (K4W)の各モード
この他、RGB,Irから心拍数を測定するモード、顔の表情を詳細分析できるExpressionモードがある。
記載日:2013年12月3日
遂に個人資格で応募していたKinect for Windows V2 Developer Preview Kitが11月27日に到着した。さて、本ホームページでK4W V2の内容を記述する前に、Microsoft社との守秘義務契約の関係上、公開内容には一定の制約があり、記載できない内容も多いことと、以下の免責事項を先に記載することにする。
【Disclaimer】
“This is preliminary software and/or hardware and APIs are preliminary and subject to change.”
【免責事項】
『次世代Kinect for Windowsのソフトウェアまたはハードウェア及びその両方は暫定仕様であり、APIに関しても暫定的なものであり、変更されることがあります。』
【K4W V2のセンサ本体の外観】
XBOX ONE用のKinect2.0のケースを利用したと思われる外観で、ちょっと変なモノクロのシールが貼ってある。センサ本体からはUSB3.0と電源ラインが一緒になったような特殊なコネクタの付いたケーブルが出ている。手元に届いた暫定版キットでは電源ユニットとセンサとパソコンのUSB3.0を相互に接続するための割と大きな変換器がついている。電源もかなりの大きさだ。
K4W V2のSDKを動かせるのはWindows8及び8.1だけであり、しかもi7でDirectX11に対応した高度なGPUが付属したパソコンが推奨されている。プログラム開発には、Visual Studio 2013を使う必要がある。
写真1は動作時のもので、KinectServiceというプログラムを起動すると、APIを介したセンサ利用が可能になる。このとき、中央部分の赤外線ブラスターから赤いレーザー光が確認できる。
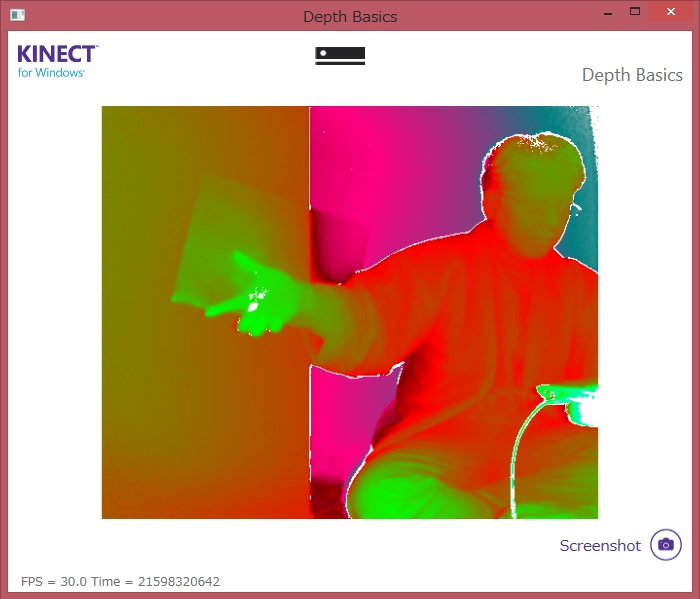
プログラムを動作させてアクセスを開始すると左端のRGBカメラレンズ穴の右横にある白いLEDが点灯する。図1は添付のデプスカメラのデモを改変してデプス・イメージをカラー化したもののスクリーンショットだ。
TOF方式デプスカメラで取得できるデプスイメージの解像度は近くでも遠くでも変化することはなく、現行Kinect Fusionレベルの画像がリアルタイムに取得できる。試しに呼吸してみたところ、はっきりと呼吸運動に伴ってビット境界の位置が変化することが確認できたほどだ。
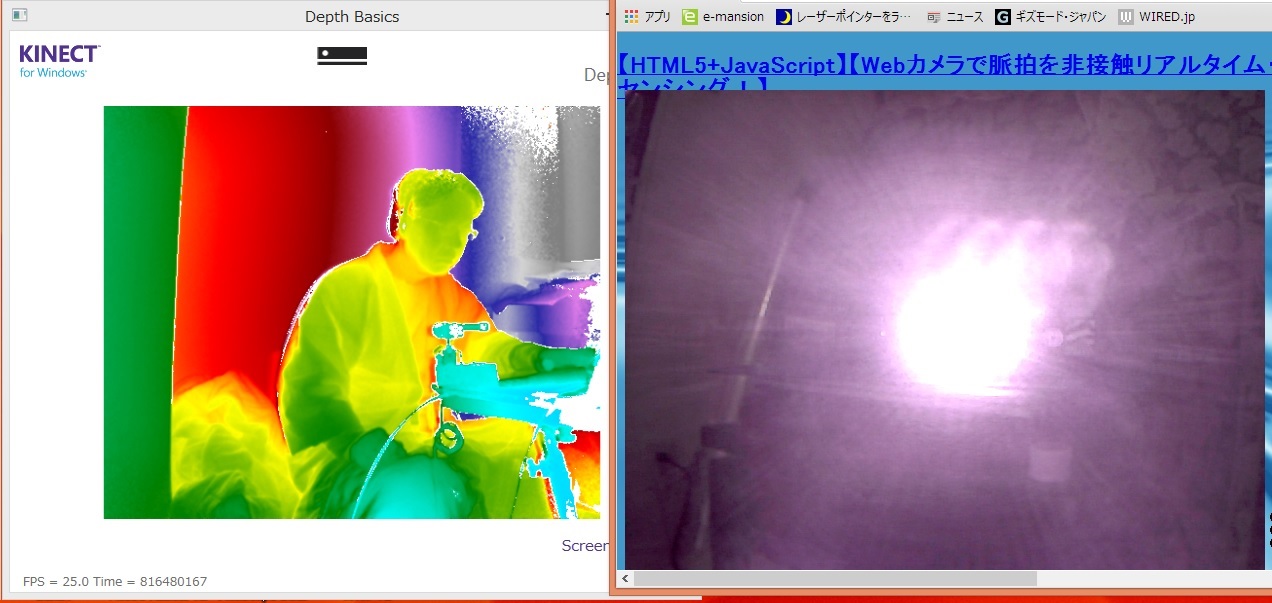
図2,図3も同じだが、図2で手に持っているのは赤外線を吸収する性質があるカーボンブラックで円形マーカーが印刷された紙である。カメラの方を向いているときはデプスカメラなのでマークが見えることはないのだが、角度がついて図2のような状態になると本来は見えないはずのマークが見えてくる。これは角度の警告を与えたりするのに使える機能かもしれない。
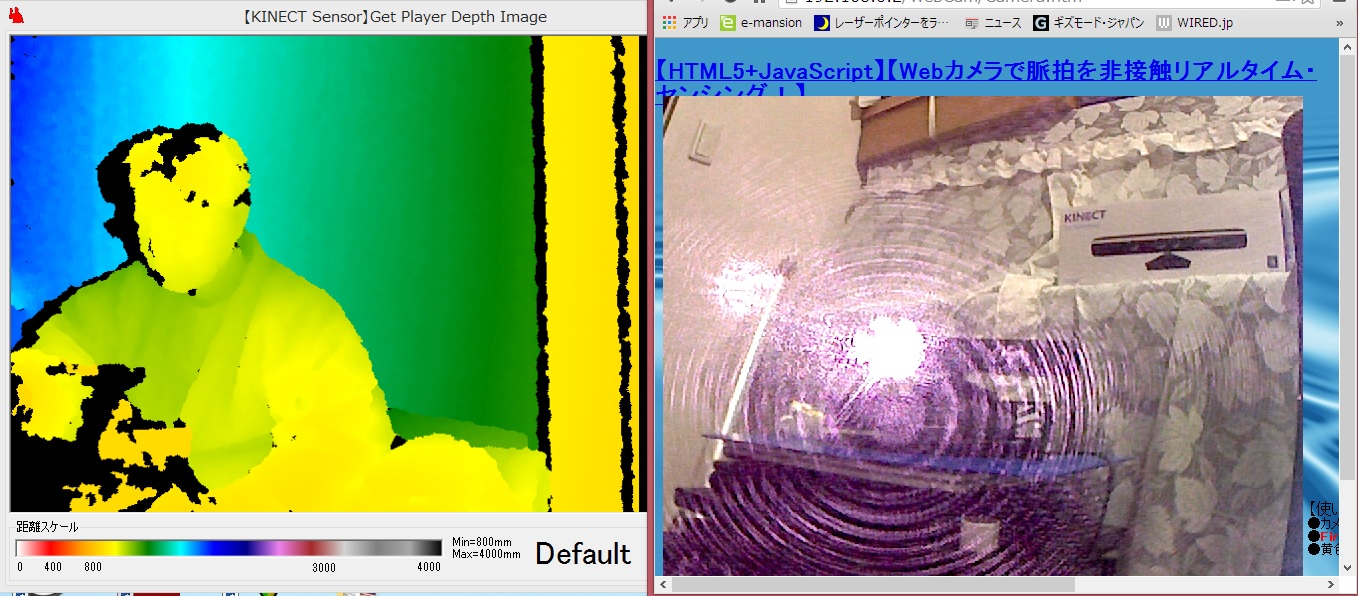
また図3は赤外線を透過する性質を持ったアクリルの場合だ。鏡面反射光がカメラに返ると距離測定が行えず、白く出ている。また、アクリル裏側にある手が映り込んでいる。
守秘義務契約によりAPIの内容は書くことができないが、現時点でも現行Kinect for Windows SDK 1.8に慣れた人ならばきっと直ぐに使えるだろうと思う。現行Kinectの知識が役に立つはずだ。
【その他の懸念事項】
●現時点での懸念事項は、赤外線ブラスターの光出力です。日本工業規格ではレーザーの光出力に関して規定が定められていますが、クラスⅠとは思えないほどで、十数mW位出ている可能性(クラスⅢB相当)があります。(簡易な測定の結果なので精確ではありませんが。)
“This is preliminary software and/or hardware and APIs are preliminary and subject to change.”
Kinect Studio 2.0を使っているとき、センサを傾斜させると、カメラ穴をふさいでいても、グラフィック表示がセンサの向きに応じて変わる事に気が付きました。これは3軸加速度センサが実装されていることを示唆しています。そこでKinect V2を分解して確認してみました。
すると...ロームの子会社である米Kionix社の3軸加速度センサ(KXUD9)が赤外線カメラのあたりに実装されていることが確認できました。
なお、もしかすると製品版のKinect for Windows v2ではこのセンサはKXTI9にバージョンアップされる可能性があります。















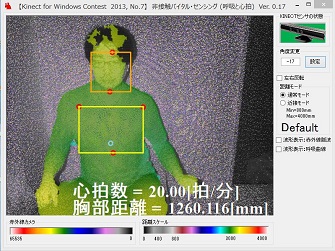 顔・胸部追尾
顔・胸部追尾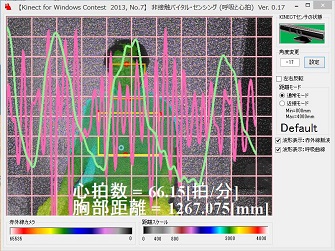 測定中
測定中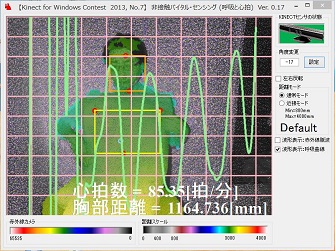 分厚い布団の上からでも体に密着させれば呼吸センシング可能
分厚い布団の上からでも体に密着させれば呼吸センシング可能