|
|
【KXTI9-1001の主なレジスタ一覧】
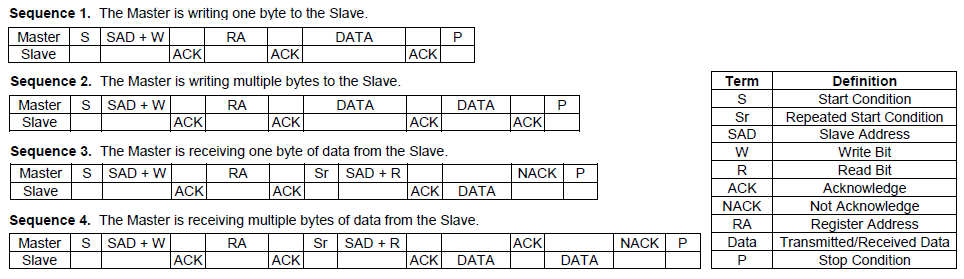
KXTI9-1001にはタップ検出やチルト検出など多数の機能が実装されており、複雑なFIFO動作モードなどが用意されているため、内部レジスタの数は多いのですが、とりあえず加速度を検出して取り込むだけなら、3つのコントロールレジスタと6つの読出しレジスタだけを取り扱えばOKです。
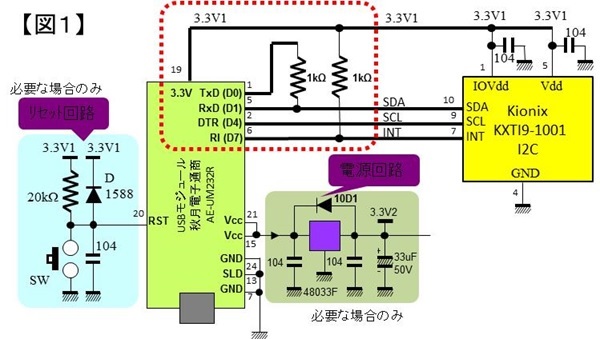
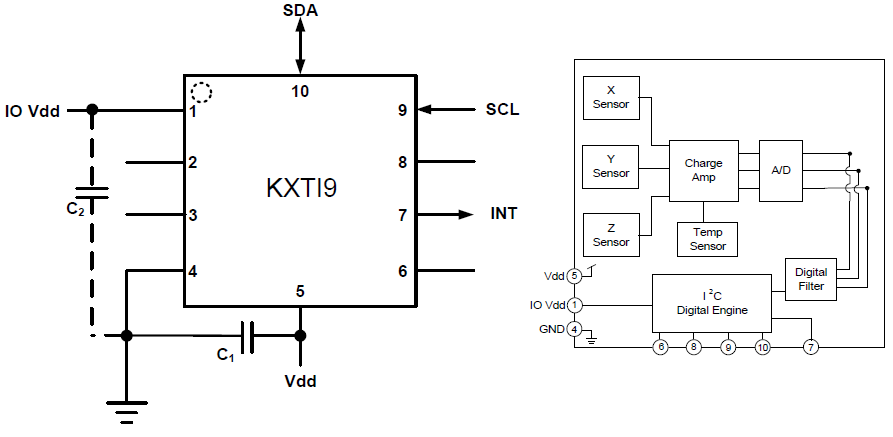
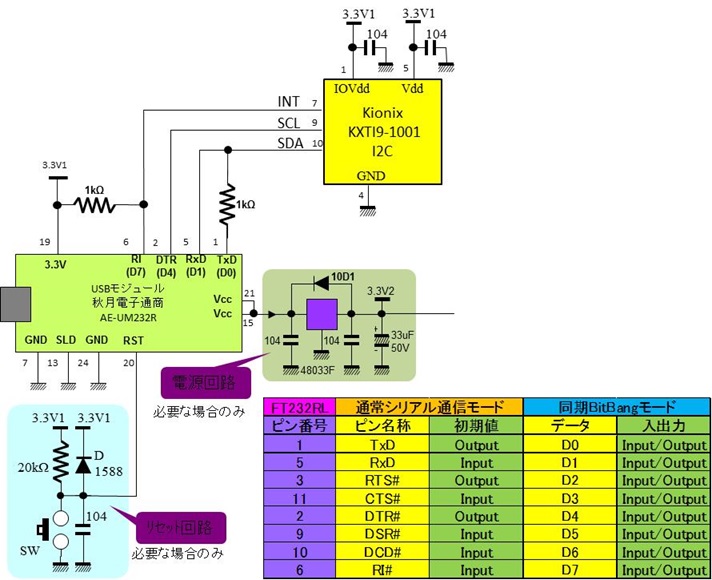
【KXTI9-1001のスレーブ・アドレス】
KXTI9のスレーブ・アドレスは0001111Bに固定されています。
【KXTI9-1001のモード設定】
KXTI9-1001は非常に複雑な機能を持った高機能なデバイスですが、最低限度の3軸加速度の計測を行う為に設定が必要なレジスタはCTRL_REG1(レジスタ・アドレスは1BH)だけです。モード設定のための他のレジスタは多いのですが、デフォルト設定のままで使用することができます。図5に示すように、PC1ビットで動作状態(Operating Mode)と待機状態(Stand By Mode)を切り替えることができます。他のビットの設定を切り替えるには必ず待機状態(PC1=0)で設定を行う必要があります。
分解能12ビット、測定レンジ±8gで加速度測定を行うのであれば、レジスタ(1BH)に2回書込みを行う必要があります。1回目に01011000B=58H、2回目に11011000B=D8Hを書き込みます。
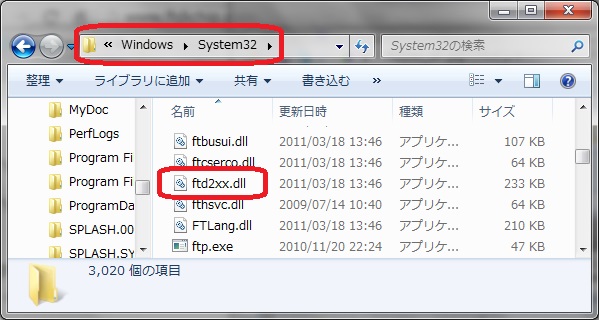
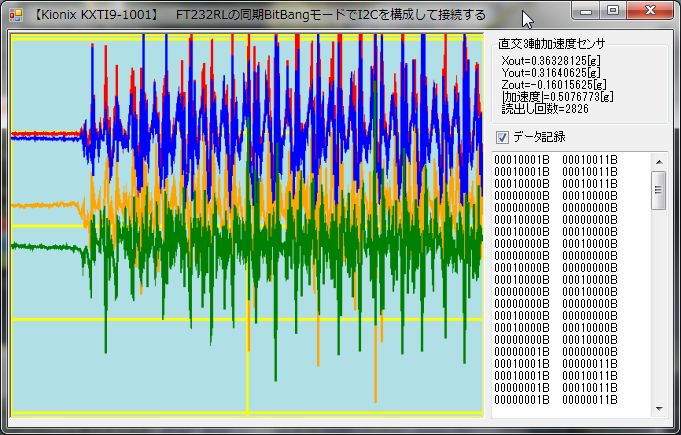
【加速度計測値の読出し】
図8に示すように、加速度測定データの読出しには6個のレジスタ(06H, 07H, 08H, 09H, 0AH, 0BH)を読み出す必要があります。注意すべき点は下位バイト、上位バイトの順に並んでいることと、左詰めでデータが並んでいるので、下位バイトのレジスタの下位4ビットが無効なデータである点です。
分解能8ビットのモードでは上位バイトと下位バイトに4ビットずつデータが分かれてしまう設計なので注意が必要です。パソコンでは殆どメリットがありません。12ビットで読み込む方が良いでしょう。
|
|

PC1 0:StandByMode 1:OperatingMode
RES 【A/D分解能】0:8bits 1:12bits
DRDYE【DataReady反映機能】 0:非許可 1:IntにDataReadyが反映される
GSEL1, GSEL0, Range
0, 0, ±2g
0, 1, ±4g
1, 1, ±8g
1, 1, NA
TDTE【DirectionalTap機能】 0:非許可 1:許可
WUFE【モーション検出時WakeUp】0:非許可 1:許可
TPE 【チルト位置検出】 0:非許可 1:許可
【図5】コントロールレジスタ1

OTDTH【TapDataの出力速度】0:SLOWER 1:FASTER
LEM 【左】left
RIM 【右】right
DOM 【下】down
UPM 【上】up
FDM 【面下】face down
FUM 【面上】face up
【図6】コントロールレジスタ2

SRST 【RAM reboot】0:NoAction 1:Start RAM Reboot
OPTA, OPTB
0, 0, 1.6Hz
0, 1, 6.3Hz
1, 0, 12.5Hz(default)
1, 1, 50Hz
DCST 【SelfTest】0:NoAction
(OTDTH),OTDTA,OTDTB【DirectionTap用出力データ速度】
0, 0, 0, 50Hz
0, 0, 1, 100Hz
0, 1, 0, 200Hz
0, 1, 1, 400Hz(default)
1, 0, 0, 12.5Hz
1, 0, 1, 25Hz
1, 1, 0, 800Hz
1, 1, 1, 1600Hz
OWUFA,OWUFB 【MotionWakeUpの出力速度】
0, 0, 25Hz
0, 1, 50Hz(default)
1, 0, 100Hz
1, 1, 200Hz
【図7】コントロールレジスタ3
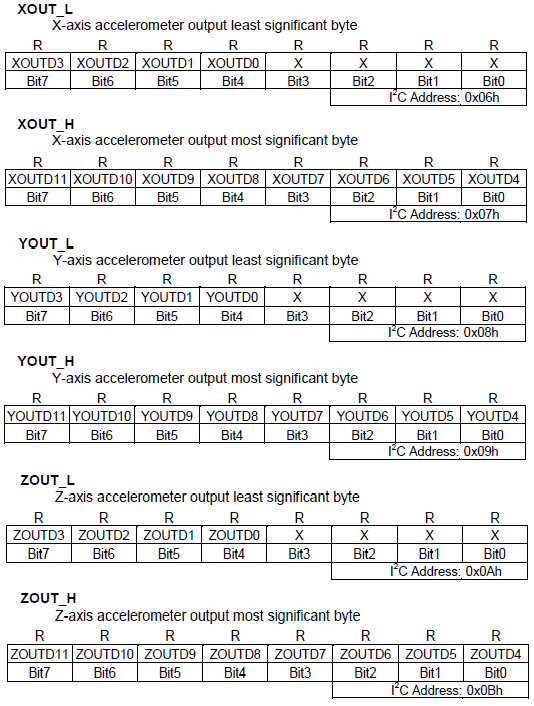
【図8】データ読出しレジスタ
|